

Question Number 217565 by mr W last updated on 16/Mar/25
Commented by mr W last updated on 16/Mar/25
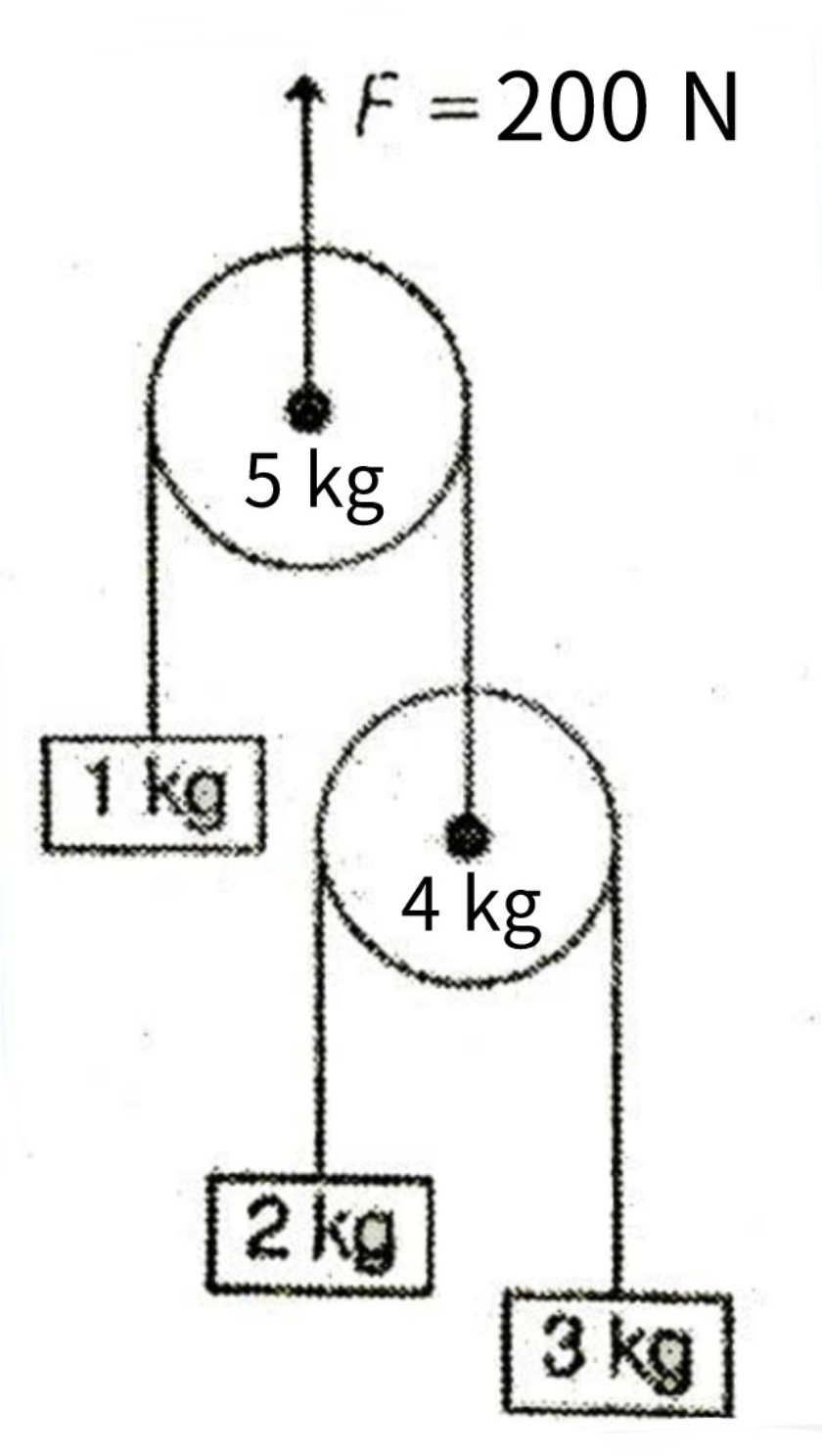
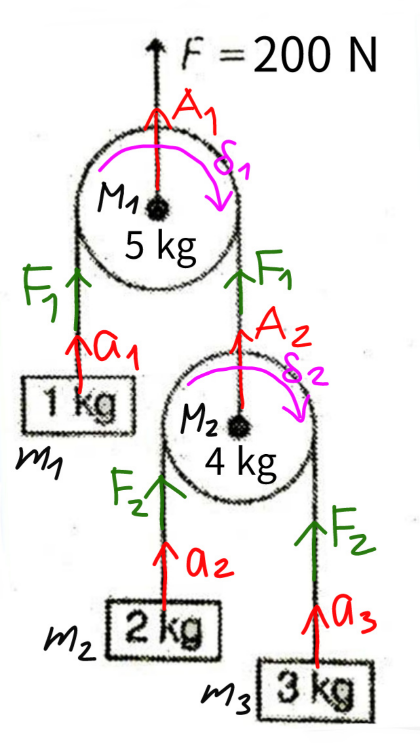
$${the}\:{strings}\:{are}\:{massless}\:{and}\:{there} \\ $$$${is}\:{no}\:{friction}\:{between}\:{strings}\:{and} \\ $$$${pulleys}. \\ $$$${find}\:{the}\:{accelerations}\:{of}\:{all}\:{objects}. \\ $$
Answered by ajfour last updated on 16/Mar/25
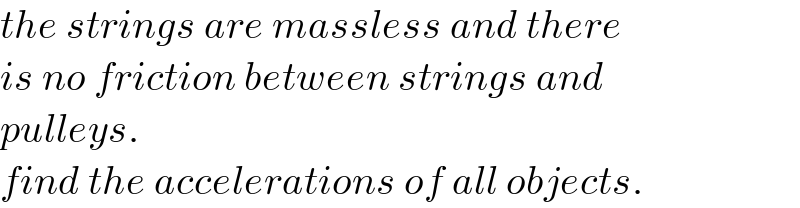
$${Acc}.\:{of}\:\mathrm{5}{kg}\:{block}\:{be}\:{A}. \\ $$$${relative}\:{to}\:\mathrm{4}{kg}\:{pulley}\:{let}\:{acc}.\:{of}\:\mathrm{3}{kg}\:{be}\:{a}_{\mathrm{1}} \downarrow \\ $$$${and}\:{that}\:{acc}.\:{of}\:\mathrm{4}{kg}\:{block}\:{itself}\:{be}\:{a}\downarrow\:{relative} \\ $$$${to}\:\mathrm{5}{kg}\:{block}. \\ $$$$\mathrm{3}{g}−{T}_{\mathrm{1}} =\mathrm{3}\left({A}+{a}+{a}_{\mathrm{1}} \right)\:\:\:\:...\left({i}\right) \\ $$$${T}_{\mathrm{1}} −\mathrm{2}{g}=\mathrm{2}\left({A}+{a}−{a}_{\mathrm{1}} \right)\:\:...\left({ii}\right) \\ $$$${T}_{\mathrm{2}} −{g}={A}+{a}\:\:\:\:\:\:....\left({iii}\right) \\ $$$$\mathrm{2}{T}_{\mathrm{2}} −{T}_{\mathrm{1}} =\mathrm{4}\left({a}−{A}\right)\:\:\:\:...\left({iv}\right) \\ $$$$\mathrm{200}−\mathrm{2}{T}_{\mathrm{1}} =\mathrm{5}{A}\:\:\:\:\:...\left({v}\right) \\ $$$$.................. \\ $$$$\mathrm{4}\left({A}+{a}+{g}\right)−\mathrm{2}{T}_{\mathrm{1}} =\mathrm{8}\left({a}−{A}\right) \\ $$$$\mathrm{200}−\mathrm{2}{T}_{\mathrm{1}} =\mathrm{5}{A} \\ $$$$\Rightarrow\:\:\mathrm{200}−\mathrm{4}\left({A}+{a}+{g}\right)=\mathrm{13}{A}−\mathrm{8}{a}\:\:..\left(\mathrm{1}\right) \\ $$$${addingr}\:\left({i}\right)\&\left({ii}\right) \\ $$$${g}=\mathrm{5}{A}+\mathrm{5}{a}+{a}_{\mathrm{1}} \:\:\:....\left(\mathrm{2}\right) \\ $$$${uding}\:\left({ii}\right)\:{in}\:\left({v}\right) \\ $$$$\mathrm{200}−\mathrm{4}{g}−\mathrm{4}\left({A}+{a}−{a}_{\mathrm{1}} \right)=\mathrm{5}{A} \\ $$$$\Rightarrow\:\mathrm{200}−\mathrm{4}{g}=\mathrm{9}{A}+\mathrm{4}{a}−\mathrm{4}{a}_{\mathrm{1}} \\ $$$${now}\:{using}\:\left(\mathrm{2}\right) \\ $$$$\mathrm{200}−\mathrm{4}{g}=\mathrm{9}{A}+\mathrm{4}{a}−\mathrm{4}\left({g}−\mathrm{5}{A}−\mathrm{5}{a}\right) \\ $$$$\Rightarrow\:\mathrm{200}=\mathrm{29}{A}+\mathrm{24}{a} \\ $$$${from}\:\left(\mathrm{1}\right) \\ $$$$\left\{\mathrm{200}−\mathrm{4}{g}=\mathrm{17}{A}−\mathrm{4}{a}\right\}×\mathrm{6} \\ $$$$\mathrm{1200}−\mathrm{24}{g}=\mathrm{102}{A}−\mathrm{24}{a} \\ $$$$\mathrm{200}=\mathrm{29}{A}+\mathrm{24}{a} \\ $$$${adding}\:{above}\:{two} \\ $$$$\mathrm{1400}−\mathrm{24}{g}=\mathrm{131}{A} \\ $$$${A}=\frac{\mathrm{1400}−\mathrm{24}{g}}{\mathrm{131}} \\ $$$${rest}\:{can}\:{be}\:{found}\:{now}. \\ $$
Commented by mr W last updated on 17/Mar/25
$${thanks}\:{sir}! \\ $$$${you}\:{got}\:{A}=\frac{\mathrm{1160}}{\mathrm{131}}\approx\mathrm{8}.\mathrm{85}\:{m}/{s}^{\mathrm{2}} \\ $$$${i}\:{got}\:{acc}.\:{of}\:\:\mathrm{5}{kg}\:{pulley}\: \\ $$$${A}_{\mathrm{1}} =\frac{\mathrm{5590}}{\mathrm{421}}\approx\mathrm{13}.\mathrm{28}\:{m}/{s}^{\mathrm{2}} \\ $$
Commented by ajfour last updated on 18/Mar/25
$${I}\:{ll}\:{check}\:{sir}.\:{Thanks}\:{for}\:{solving}\:{the} \\ $$$${projectile}\:{one}\:{too}. \\ $$
Commented by Tawa11 last updated on 21/Mar/25

$$ \\ $$That first line of this solution shouldn't it be (a + a₁) - A instead of a + a₁ +A
Commented by mr W last updated on 21/Mar/25
$${he}\:{didn}'{t}\:{say}\:{that}\:{A}\:{is}\:{in}\:\uparrow\:{direction}. \\ $$
Commented by Tawa11 last updated on 22/Mar/25

$$\mathrm{Thanks}\:\mathrm{sir}. \\ $$
Commented by Tawa11 last updated on 22/Mar/25
$$\mathrm{Sir},\:\mathrm{help}\:\mathrm{me}\:\mathrm{see}\:\mathrm{to}\:\mathrm{Q217797} \\ $$$$\mathrm{That}\:\mathrm{differential}\:\mathrm{equation}. \\ $$
Answered by mr W last updated on 17/Mar/25
Commented by mr W last updated on 17/Mar/25
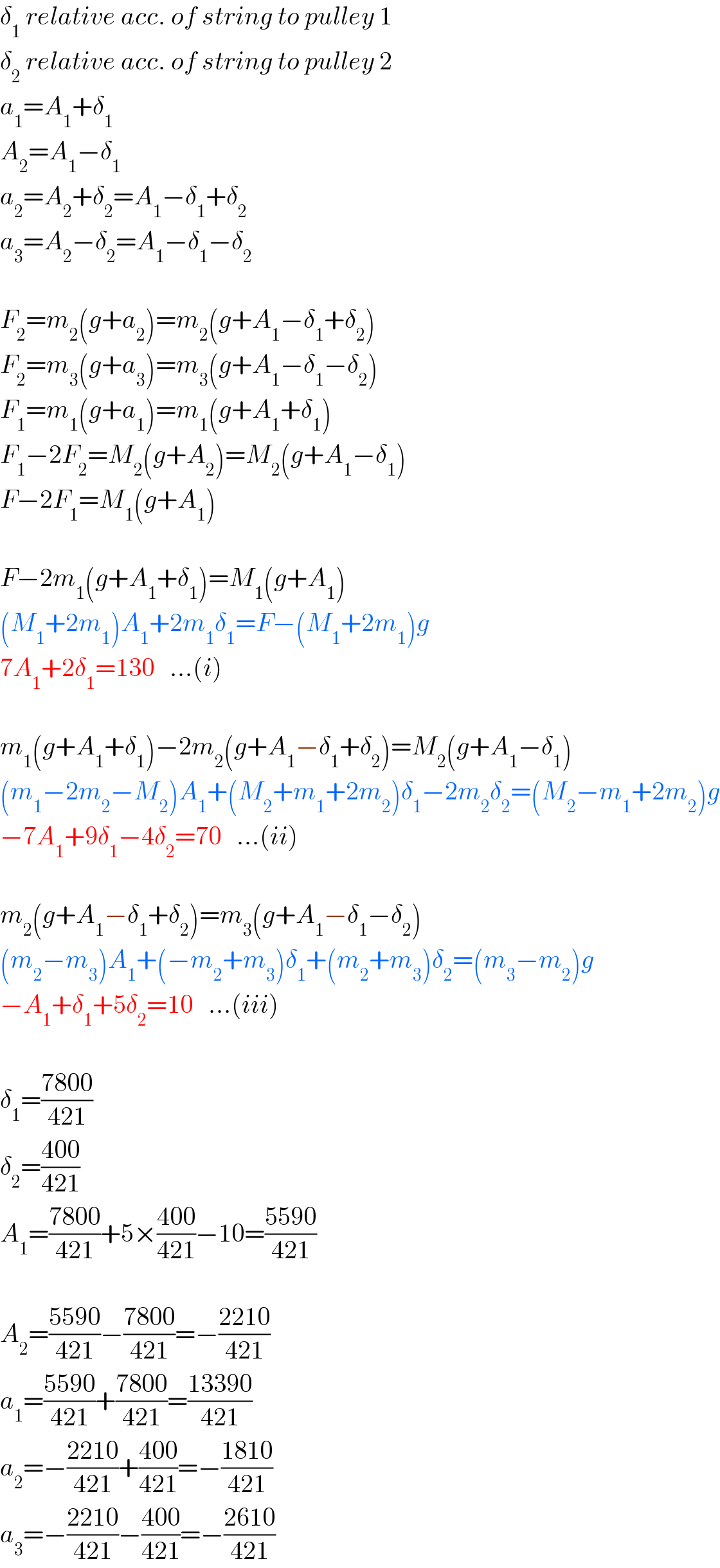
$$\delta_{\mathrm{1}} \:{relative}\:{acc}.\:{of}\:{string}\:{to}\:{pulley}\:\mathrm{1} \\ $$$$\delta_{\mathrm{2}} \:{relative}\:{acc}.\:{of}\:{string}\:{to}\:{pulley}\:\mathrm{2} \\ $$$${a}_{\mathrm{1}} ={A}_{\mathrm{1}} +\delta_{\mathrm{1}} \\ $$$${A}_{\mathrm{2}} ={A}_{\mathrm{1}} −\delta_{\mathrm{1}} \\ $$$${a}_{\mathrm{2}} ={A}_{\mathrm{2}} +\delta_{\mathrm{2}} ={A}_{\mathrm{1}} −\delta_{\mathrm{1}} +\delta_{\mathrm{2}} \\ $$$${a}_{\mathrm{3}} ={A}_{\mathrm{2}} −\delta_{\mathrm{2}} ={A}_{\mathrm{1}} −\delta_{\mathrm{1}} −\delta_{\mathrm{2}} \\ $$$$ \\ $$$${F}_{\mathrm{2}} ={m}_{\mathrm{2}} \left({g}+{a}_{\mathrm{2}} \right)={m}_{\mathrm{2}} \left({g}+{A}_{\mathrm{1}} −\delta_{\mathrm{1}} +\delta_{\mathrm{2}} \right) \\ $$$${F}_{\mathrm{2}} ={m}_{\mathrm{3}} \left({g}+{a}_{\mathrm{3}} \right)={m}_{\mathrm{3}} \left({g}+{A}_{\mathrm{1}} −\delta_{\mathrm{1}} −\delta_{\mathrm{2}} \right) \\ $$$${F}_{\mathrm{1}} ={m}_{\mathrm{1}} \left({g}+{a}_{\mathrm{1}} \right)={m}_{\mathrm{1}} \left({g}+{A}_{\mathrm{1}} +\delta_{\mathrm{1}} \right) \\ $$$${F}_{\mathrm{1}} −\mathrm{2}{F}_{\mathrm{2}} ={M}_{\mathrm{2}} \left({g}+{A}_{\mathrm{2}} \right)={M}_{\mathrm{2}} \left({g}+{A}_{\mathrm{1}} −\delta_{\mathrm{1}} \right) \\ $$$${F}−\mathrm{2}{F}_{\mathrm{1}} ={M}_{\mathrm{1}} \left({g}+{A}_{\mathrm{1}} \right) \\ $$$$ \\ $$$${F}−\mathrm{2}{m}_{\mathrm{1}} \left({g}+{A}_{\mathrm{1}} +\delta_{\mathrm{1}} \right)={M}_{\mathrm{1}} \left({g}+{A}_{\mathrm{1}} \right) \\ $$$$\left({M}_{\mathrm{1}} +\mathrm{2}{m}_{\mathrm{1}} \right){A}_{\mathrm{1}} +\mathrm{2}{m}_{\mathrm{1}} \delta_{\mathrm{1}} ={F}−\left({M}_{\mathrm{1}} +\mathrm{2}{m}_{\mathrm{1}} \right){g} \\ $$$$\mathrm{7}{A}_{\mathrm{1}} +\mathrm{2}\delta_{\mathrm{1}} =\mathrm{130}\:\:\:...\left({i}\right) \\ $$$$ \\ $$$${m}_{\mathrm{1}} \left({g}+{A}_{\mathrm{1}} +\delta_{\mathrm{1}} \right)−\mathrm{2}{m}_{\mathrm{2}} \left({g}+{A}_{\mathrm{1}} −\delta_{\mathrm{1}} +\delta_{\mathrm{2}} \right)={M}_{\mathrm{2}} \left({g}+{A}_{\mathrm{1}} −\delta_{\mathrm{1}} \right) \\ $$$$\left({m}_{\mathrm{1}} −\mathrm{2}{m}_{\mathrm{2}} −{M}_{\mathrm{2}} \right){A}_{\mathrm{1}} +\left({M}_{\mathrm{2}} +{m}_{\mathrm{1}} +\mathrm{2}{m}_{\mathrm{2}} \right)\delta_{\mathrm{1}} −\mathrm{2}{m}_{\mathrm{2}} \delta_{\mathrm{2}} =\left({M}_{\mathrm{2}} −{m}_{\mathrm{1}} +\mathrm{2}{m}_{\mathrm{2}} \right){g} \\ $$$$−\mathrm{7}{A}_{\mathrm{1}} +\mathrm{9}\delta_{\mathrm{1}} −\mathrm{4}\delta_{\mathrm{2}} =\mathrm{70}\:\:\:...\left({ii}\right) \\ $$$$ \\ $$$${m}_{\mathrm{2}} \left({g}+{A}_{\mathrm{1}} −\delta_{\mathrm{1}} +\delta_{\mathrm{2}} \right)={m}_{\mathrm{3}} \left({g}+{A}_{\mathrm{1}} −\delta_{\mathrm{1}} −\delta_{\mathrm{2}} \right) \\ $$$$\left({m}_{\mathrm{2}} −{m}_{\mathrm{3}} \right){A}_{\mathrm{1}} +\left(−{m}_{\mathrm{2}} +{m}_{\mathrm{3}} \right)\delta_{\mathrm{1}} +\left({m}_{\mathrm{2}} +{m}_{\mathrm{3}} \right)\delta_{\mathrm{2}} =\left({m}_{\mathrm{3}} −{m}_{\mathrm{2}} \right){g} \\ $$$$−{A}_{\mathrm{1}} +\delta_{\mathrm{1}} +\mathrm{5}\delta_{\mathrm{2}} =\mathrm{10}\:\:\:...\left({iii}\right) \\ $$$$ \\ $$$$\delta_{\mathrm{1}} =\frac{\mathrm{7800}}{\mathrm{421}} \\ $$$$\delta_{\mathrm{2}} =\frac{\mathrm{400}}{\mathrm{421}} \\ $$$${A}_{\mathrm{1}} =\frac{\mathrm{7800}}{\mathrm{421}}+\mathrm{5}×\frac{\mathrm{400}}{\mathrm{421}}−\mathrm{10}=\frac{\mathrm{5590}}{\mathrm{421}} \\ $$$$ \\ $$$${A}_{\mathrm{2}} =\frac{\mathrm{5590}}{\mathrm{421}}−\frac{\mathrm{7800}}{\mathrm{421}}=−\frac{\mathrm{2210}}{\mathrm{421}} \\ $$$${a}_{\mathrm{1}} =\frac{\mathrm{5590}}{\mathrm{421}}+\frac{\mathrm{7800}}{\mathrm{421}}=\frac{\mathrm{13390}}{\mathrm{421}} \\ $$$${a}_{\mathrm{2}} =−\frac{\mathrm{2210}}{\mathrm{421}}+\frac{\mathrm{400}}{\mathrm{421}}=−\frac{\mathrm{1810}}{\mathrm{421}} \\ $$$${a}_{\mathrm{3}} =−\frac{\mathrm{2210}}{\mathrm{421}}−\frac{\mathrm{400}}{\mathrm{421}}=−\frac{\mathrm{2610}}{\mathrm{421}} \\ $$
Commented by Tawa11 last updated on 18/Mar/25
$$\mathrm{Sir},\:\mathrm{you}\:\mathrm{assumed}\:\mathrm{the}\:\mathrm{cylinder}\:\mathrm{are}\:\mathrm{rotating}\:\mathrm{here}. \\ $$$$\mathrm{But}\:\mathrm{Ajfour}\:\mathrm{did}\:\mathrm{not}\:\mathrm{assume}\:\mathrm{the}\:\mathrm{cylinder}\:\mathrm{is}\:\mathrm{rotating}. \\ $$
Commented by mr W last updated on 18/Mar/25
$${The}\:{pulleys}\:{don}'{t}\:{rotate}\:{and}\:{i}\:{also} \\ $$$${didn}'{t}\:{assume}\:{that}\:{they}\:{rotate}. \\ $$
Commented by Tawa11 last updated on 18/Mar/25

$$\mathrm{Thanks}\:\mathrm{sir}. \\ $$
Commented by mr W last updated on 18/Mar/25
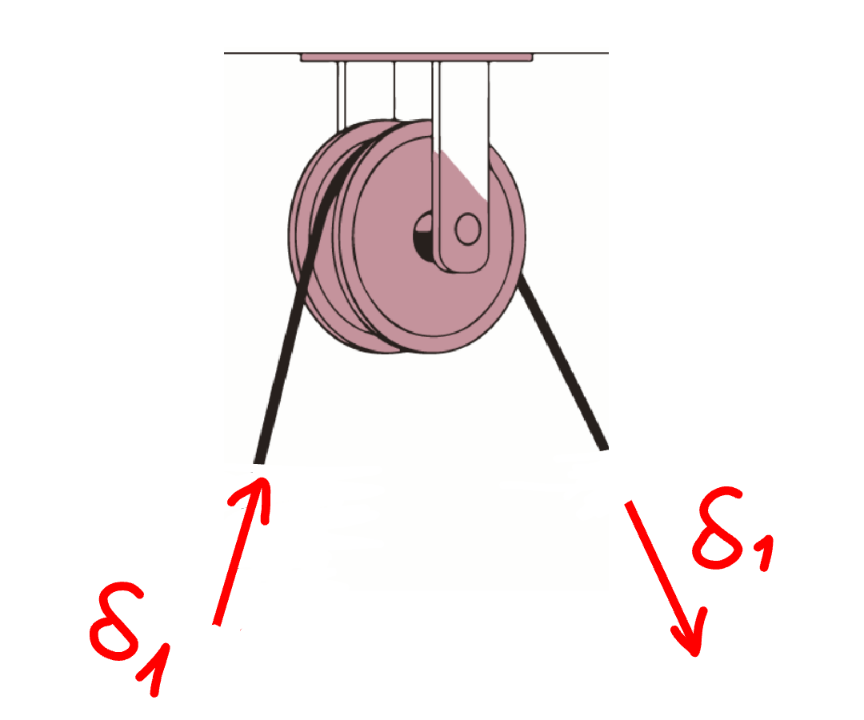
$${if}\:{there}\:{is}\:{no}\:{friction}\:{between}\:{string} \\ $$$${and}\:{pulley},\:{the}\:{string}\:{can}\:{also}\: \\ $$$${move}\:{relatively}\:{to}\:{the}\:{pulley}\:{without} \\ $$$${that}\:{the}\:{pulley}\:{rotates}. \\ $$$${in}\:{the}\:{workings}\:{above}\:\delta_{\mathrm{1}} \:{and}\:\delta_{\mathrm{2}} \:{are} \\ $$$${the}\:{relative}\:{motions}\:{of}\:{the}\:{strings} \\ $$$${along}\:{the}\:{pulleys}.\:{there}\:{are}\:{not}\:{the} \\ $$$${rotation}\:{of}\:{the}\:{pulleys}! \\ $$
Commented by mr W last updated on 18/Mar/25
Commented by Tawa11 last updated on 18/Mar/25
$$\mathrm{Ohh},\:\mathrm{thanks}\:\mathrm{sir}. \\ $$$$\mathrm{I}\:\mathrm{appreciate}\:\mathrm{your}\:\mathrm{time}. \\ $$