

Question Number 215650 by mr W last updated on 13/Jan/25
Commented by mr W last updated on 14/Jan/25
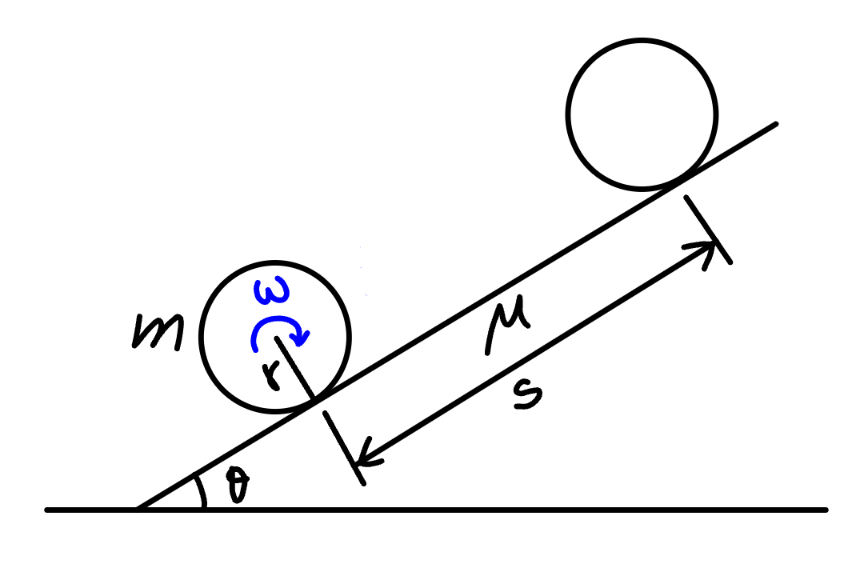
$${a}\:{rotating}\:{disc}\:{with}\:{angular}\:{velocity} \\ $$$$\boldsymbol{\omega}\:{is}\:{put}\:{on}\:{an}\:{incline}\:{with}\:{rough}\: \\ $$$${surface}\:{as}\:{shown}.\: \\ $$$${find}\:{the}\:{maximum}\:{distance}\:{the}\: \\ $$$${disc}\:{can}\:{move}\:{upwards}\:{along}\:{the}\: \\ $$$${incline}. \\ $$$${the}\:{friction}\:{coefficient}\:{is}\:\boldsymbol{\mu}. \\ $$$$ \\ $$$$\left({original}\:{question}\:{see}\:{youtube}\right. \\ $$$$\left.{channel}\:{from}\:{ajfour}\:{sir}\right) \\ $$
Commented by mr W last updated on 15/Jan/25
https://youtu.be/3wiUgK_riz8?si=HlRNIT6W5V9kkg1q
Answered by Wuji last updated on 13/Jan/25
$$\mathrm{E}_{\mathrm{rot}} =\frac{\mathrm{1}}{\mathrm{2}}\mathrm{I}\omega^{\mathrm{2}} \\ $$$$\mathrm{for}\:\mathrm{solid}\:\mathrm{disc},\:\mathrm{the}\:\:\mathrm{momment}\:\mathrm{of} \\ $$$$\mathrm{inertia}\:\mathrm{I}\:\mathrm{is} \\ $$$$\mathrm{I}=\frac{\mathrm{1}}{\mathrm{2}}\mathrm{mr}^{\mathrm{2}} \\ $$$$\mathrm{gravutational}\:\mathrm{potential}\:\mathrm{energy} \\ $$$$\mathrm{at}\:\mathrm{height}\:\mathrm{h} \\ $$$$\mathrm{E}_{\mathrm{grav}} =\mathrm{mgh} \\ $$$$\mathrm{Workdone}\:\mathrm{aginst}\:\mathrm{friction} \\ $$$$\mathrm{W}_{\mathrm{f}} =\mu\mathrm{mgcos}\theta\mathrm{S} \\ $$$$\mathrm{from}\:\mathrm{Energy}\:\mathrm{conservation} \\ $$$$\mathrm{E}_{\mathrm{rot}} =\mathrm{E}_{\mathrm{grav}} +\mathrm{W}_{\mathrm{f}} \\ $$$$\frac{\mathrm{1}}{\mathrm{4}}\mathrm{mr}^{\mathrm{2}} \omega^{\mathrm{2}} =\mathrm{mgh}+\mu\mathrm{mgcos}\theta\mathrm{S} \\ $$$$\mathrm{S}=\frac{\frac{\mathrm{1}}{\mathrm{4}}\mathrm{mr}^{\mathrm{2}} \omega^{\mathrm{2}} −\mathrm{mgh}}{\mu\mathrm{mgcos}\theta} \\ $$$$\mathrm{S}=\frac{\mathrm{mr}^{\mathrm{2}} \omega^{\mathrm{2}} −\mathrm{4mgh}}{\mathrm{4}\mu\mathrm{mgcos}\theta} \\ $$$$\mathrm{S}=\frac{\mathrm{m}\left(\mathrm{r}^{\mathrm{2}} \omega^{\mathrm{2}} −\mathrm{4gh}\right)}{\mathrm{m}\left(\mathrm{4}\mu\mathrm{gcos}\theta\right)} \\ $$$$\mathrm{S}=\frac{\mathrm{r}^{\mathrm{2}} \omega^{\mathrm{2}} −\mathrm{4gh}}{\mathrm{4}\mu\mathrm{gcos}\theta} \\ $$
Commented by mr W last updated on 13/Jan/25
$${not}\:{correct}!\:{only}\:{friction}\:{by}\:{slipping} \\ $$$${causes}\:{loss}\:{of}\:{energy}.\:{but}\:{not}\:{the} \\ $$$${whole}\:{distance}\:{s}\:{is}\:{slipping}.\:{only} \\ $$$${a}\:{part}\:{of}\:{it}\:{is}\:{slipping},\:{the}\:{other} \\ $$$${part}\:{is}\:{rolling}.\:{the}\:{rolling}\:{part} \\ $$$${doesn}'{t}\:{cause}\:{energy}\:{loss}. \\ $$
Answered by mr W last updated on 14/Jan/25
Commented by mr W last updated on 16/Jan/25
![case 1: the friction coefficient is large: 𝛍>tan 𝛉 in this case the rotating disc will move upwards along the incline after it is released. for solid disc: I=((mr^2 )/2) t=0 → t_1 : rolling & slipping friction force f=μmg cos θ (↗) a=((μmg cos θ−mg sin θ)/m)=g(μ cos θ−sin θ) α=((fr)/I)=((rμmg cos θ)/((mr^2 )/2))=((2μg cos θ)/r) v_1 =ω_1 r t_1 =(v_1 /a)=((ω−ω_1 )/α) ((ω_1 r)/(g(μ cos θ−sin θ)))=(((ω−ω_1 )r)/(2μg cos θ)) (ω_1 /(μ−tan θ))=((ω−ω_1 )/(2μ)) ⇒ω_1 =(((μ−tan θ)ω)/(3μ−tan θ)) s_1 =(v_1 ^2 /(2a))=(((μ−tan θ)^2 ω^2 r^2 )/(2g(μcos θ−sin θ)(3μ−tan θ)^2 )) ⇒s_1 =(((μ−tan θ)ω^2 r^2 )/(2g(3μ−tan θ)^2 cos θ)) check: rotation of disc ϕ_1 ϕ_1 =((ω^2 −ω_1 ^2 )/(2α))=(r/(4μg cos θ))[1−(((μ−tan θ)^2 )/((3μ−tan θ)^2 ))]ω^2 ϕ_1 r=(((2μ−tan θ)ω^2 r^2 )/(g(3μ−tan θ)^2 cos θ)) > s_1 ⇒ slipping indeed! ϕ_1 =(((2μ−tan θ)ω^2 r)/(g(3μ−tan θ)^2 cos θ)) t=t_1 → t_2 : rolling only K.E. ⇒P.E. (1/2)(((mr^2 )/2)+mr^2 )ω_1 ^2 =mg s_2 sin θ s_2 =((3mr^2 )/(4mg sin θ))×(((μ−tan θ)^2 ω^2 )/((3μ−tan θ)^2 )) ⇒s_2 =((3(μ−tan θ)^2 ω^2 r^2 )/(4g(3μ−tan θ)^2 sin θ)) ϕ_2 =(s_2 /r)=((3(μ−tan θ)^2 ω^2 r)/(4g (3μ−tan θ)^2 sin θ)) ⇒ϕ_2 =((3(μ−tan θ)^2 ω^2 r)/(4g(3μ−tan θ)^2 sin θ)) total distance s=s_1 +s_2 s=(((μ−tan θ)ω^2 r^2 )/(2g(3μ−tan θ)^2 cos θ))+((3(μ−tan θ)^2 ω^2 r^2 )/(4g (3μ−tan θ)^2 sin θ)) ⇒s=(((μ−tan θ)ω^2 r^2 )/(4g(3μ−tan θ) sin θ)) or s sin θ=h=(((μ−tan θ)ω^2 r^2 )/(4g(3μ−tan θ))) mgh′=(1/2)×((mω^2 r^2 )/2) h′=((ω^2 r^2 )/(4g)) we see h=(((μ−tan θ)h′)/(3μ−tan θ))<h′ ϕ=ϕ_1 +ϕ_2 =(((2μ−tan θ)ω^2 r)/(g cos θ (3μ−tan θ)^2 ))+((3(μ−tan θ)^2 ω^2 r)/(4g(3μ−tan θ)^2 sin θ)) ⇒ϕ=(((μ+tan θ)ω^2 r)/(4g(3μ−tan θ) sin θ))](Q215676.png)
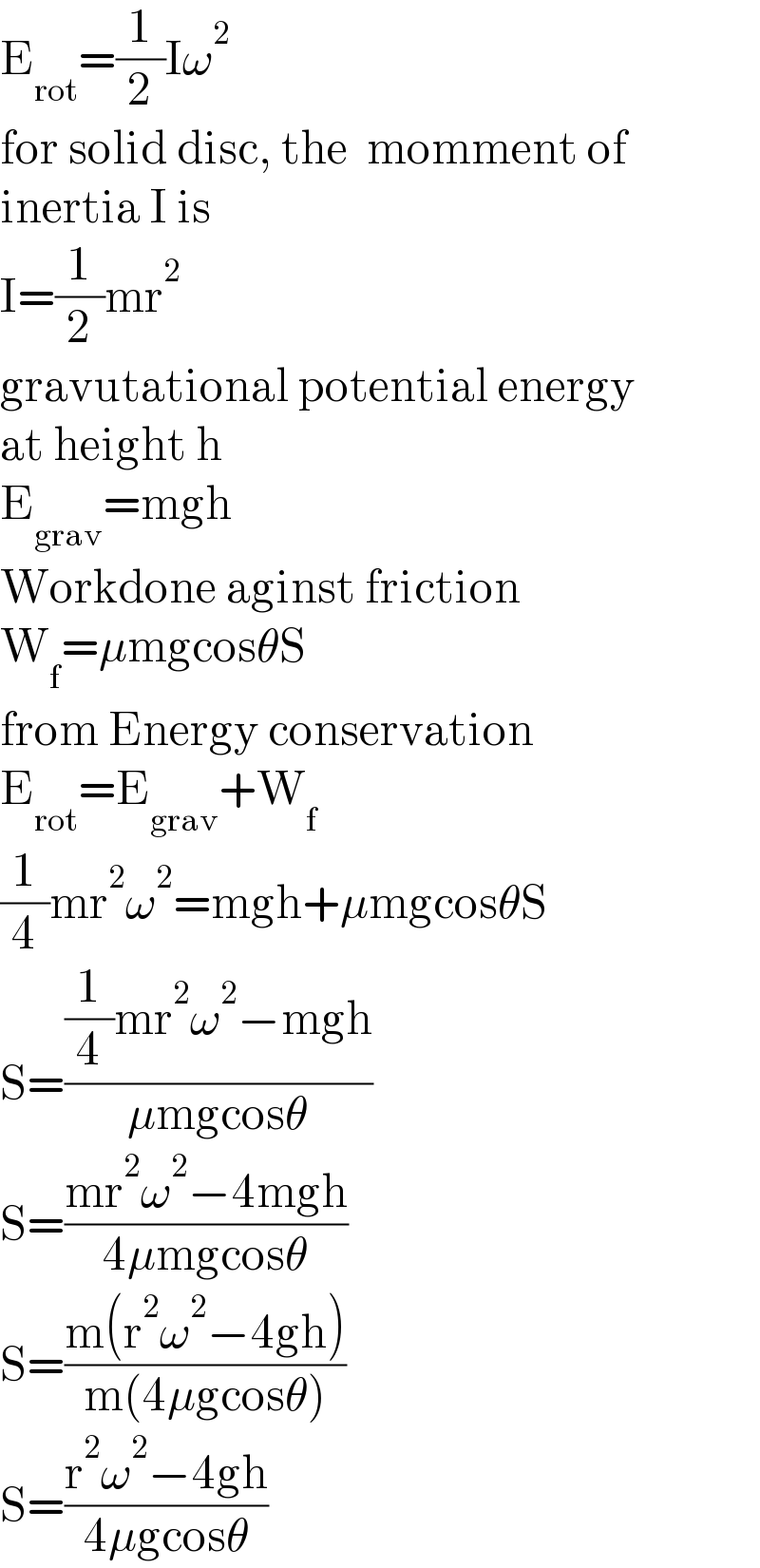
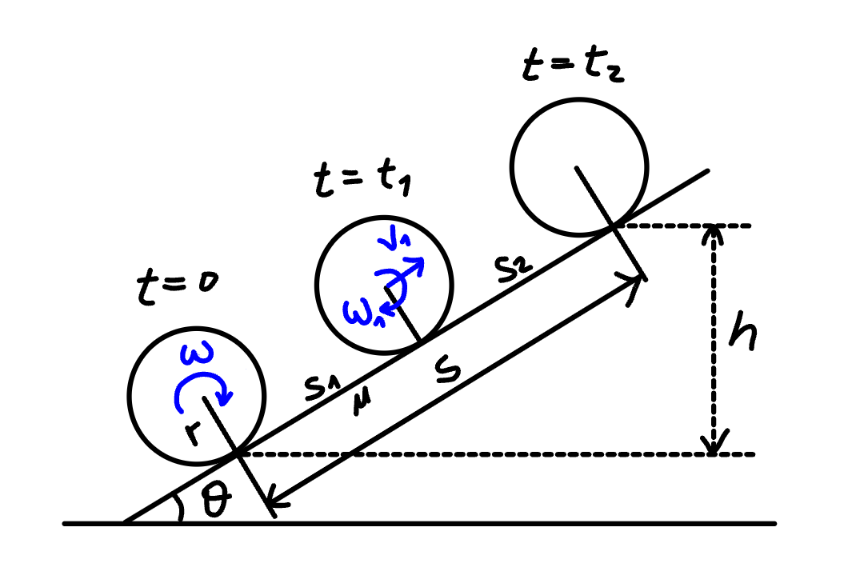
$$\boldsymbol{{case}}\:\mathrm{1}:\:\boldsymbol{{the}}\:\boldsymbol{{friction}}\:\boldsymbol{{coefficient}}\: \\ $$$$\boldsymbol{{is}}\:\boldsymbol{{large}}:\:\boldsymbol{\mu}>\boldsymbol{\mathrm{tan}}\:\boldsymbol{\theta} \\ $$$$ \\ $$$${in}\:{this}\:{case}\:{the}\:{rotating}\:{disc}\:{will}\: \\ $$$${move}\:{upwards}\:{along}\:{the}\:{incline}\: \\ $$$${after}\:{it}\:{is}\:{released}. \\ $$$${for}\:{solid}\:{disc}:\:{I}=\frac{{mr}^{\mathrm{2}} }{\mathrm{2}} \\ $$$$\underline{{t}=\mathrm{0}\:\rightarrow\:{t}_{\mathrm{1}} :\:{rolling}\:\&\:{slipping}} \\ $$$${friction}\:{force}\:{f}=\mu{mg}\:\mathrm{cos}\:\theta\:\:\left(\nearrow\right) \\ $$$${a}=\frac{\mu{mg}\:\mathrm{cos}\:\theta−{mg}\:\mathrm{sin}\:\theta}{{m}}={g}\left(\mu\:\mathrm{cos}\:\theta−\mathrm{sin}\:\theta\right) \\ $$$$\alpha=\frac{{fr}}{{I}}=\frac{{r}\mu{mg}\:\mathrm{cos}\:\theta}{\frac{{mr}^{\mathrm{2}} }{\mathrm{2}}}=\frac{\mathrm{2}\mu{g}\:\mathrm{cos}\:\theta}{{r}} \\ $$$${v}_{\mathrm{1}} =\omega_{\mathrm{1}} {r} \\ $$$${t}_{\mathrm{1}} =\frac{{v}_{\mathrm{1}} }{{a}}=\frac{\omega−\omega_{\mathrm{1}} }{\alpha} \\ $$$$\frac{\omega_{\mathrm{1}} {r}}{{g}\left(\mu\:\mathrm{cos}\:\theta−\mathrm{sin}\:\theta\right)}=\frac{\left(\omega−\omega_{\mathrm{1}} \right){r}}{\mathrm{2}\mu{g}\:\mathrm{cos}\:\theta} \\ $$$$\frac{\omega_{\mathrm{1}} }{\mu−\mathrm{tan}\:\theta}=\frac{\omega−\omega_{\mathrm{1}} }{\mathrm{2}\mu} \\ $$$$\Rightarrow\omega_{\mathrm{1}} =\frac{\left(\mu−\mathrm{tan}\:\theta\right)\omega}{\mathrm{3}\mu−\mathrm{tan}\:\theta} \\ $$$${s}_{\mathrm{1}} =\frac{{v}_{\mathrm{1}} ^{\mathrm{2}} }{\mathrm{2}{a}}=\frac{\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{2}{g}\left(\mu\mathrm{cos}\:\theta−\mathrm{sin}\:\theta\right)\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} } \\ $$$$\Rightarrow{s}_{\mathrm{1}} =\frac{\left(\mu−\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{2}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \mathrm{cos}\:\theta} \\ $$$${check}: \\ $$$${rotation}\:{of}\:{disc}\:\varphi_{\mathrm{1}} \\ $$$$\varphi_{\mathrm{1}} =\frac{\omega^{\mathrm{2}} −\omega_{\mathrm{1}} ^{\mathrm{2}} }{\mathrm{2}\alpha}=\frac{{r}}{\mathrm{4}\mu{g}\:\mathrm{cos}\:\theta}\left[\mathrm{1}−\frac{\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} }{\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} }\right]\omega^{\mathrm{2}} \\ $$$$\varphi_{\mathrm{1}} {r}=\frac{\left(\mathrm{2}\mu−\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \:\mathrm{cos}\:\theta}\:>\:{s}_{\mathrm{1}} \\ $$$$\Rightarrow\:{slipping}\:{indeed}! \\ $$$$\varphi_{\mathrm{1}} =\frac{\left(\mathrm{2}\mu−\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}}{{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \:\mathrm{cos}\:\theta} \\ $$$$ \\ $$$$\underline{{t}={t}_{\mathrm{1}} \:\rightarrow\:{t}_{\mathrm{2}} :\:{rolling}\:{only}} \\ $$$${K}.{E}.\:\Rightarrow{P}.{E}. \\ $$$$\frac{\mathrm{1}}{\mathrm{2}}\left(\frac{{mr}^{\mathrm{2}} }{\mathrm{2}}+{mr}^{\mathrm{2}} \right)\omega_{\mathrm{1}} ^{\mathrm{2}} ={mg}\:{s}_{\mathrm{2}} \:\mathrm{sin}\:\theta \\ $$$${s}_{\mathrm{2}} =\frac{\mathrm{3}{mr}^{\mathrm{2}} }{\mathrm{4}{mg}\:\mathrm{sin}\:\theta}×\frac{\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \omega^{\mathrm{2}} }{\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} } \\ $$$$\Rightarrow{s}_{\mathrm{2}} =\frac{\mathrm{3}\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{4}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \:\mathrm{sin}\:\theta} \\ $$$$\varphi_{\mathrm{2}} =\frac{{s}_{\mathrm{2}} }{{r}}=\frac{\mathrm{3}\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \omega^{\mathrm{2}} {r}}{\mathrm{4}{g}\:\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \:\mathrm{sin}\:\theta} \\ $$$$\Rightarrow\varphi_{\mathrm{2}} =\frac{\mathrm{3}\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \omega^{\mathrm{2}} {r}}{\mathrm{4}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \:\mathrm{sin}\:\theta} \\ $$$$ \\ $$$${total}\:{distance}\:{s}={s}_{\mathrm{1}} +{s}_{\mathrm{2}} \\ $$$${s}=\frac{\left(\mu−\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{2}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \mathrm{cos}\:\theta}+\frac{\mathrm{3}\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{4}{g}\:\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \:\mathrm{sin}\:\theta} \\ $$$$\Rightarrow{s}=\frac{\left(\mu−\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{4}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)\:\mathrm{sin}\:\theta} \\ $$$${or} \\ $$$${s}\:\mathrm{sin}\:\theta={h}=\frac{\left(\mu−\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{4}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)} \\ $$$$ \\ $$$${mgh}'=\frac{\mathrm{1}}{\mathrm{2}}×\frac{{m}\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{2}} \\ $$$${h}'=\frac{\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{4}{g}} \\ $$$${we}\:{see}\:{h}=\frac{\left(\mu−\mathrm{tan}\:\theta\right){h}'}{\mathrm{3}\mu−\mathrm{tan}\:\theta}<{h}' \\ $$$$ \\ $$$$\varphi=\varphi_{\mathrm{1}} +\varphi_{\mathrm{2}} =\frac{\left(\mathrm{2}\mu−\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}}{{g}\:\mathrm{cos}\:\theta\:\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} }+\frac{\mathrm{3}\left(\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \omega^{\mathrm{2}} {r}}{\mathrm{4}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \:\mathrm{sin}\:\theta} \\ $$$$\Rightarrow\varphi=\frac{\left(\mu+\mathrm{tan}\:\theta\right)\omega^{\mathrm{2}} {r}}{\mathrm{4}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)\:\mathrm{sin}\:\theta} \\ $$
Commented by mr W last updated on 14/Jan/25
Commented by mr W last updated on 14/Jan/25
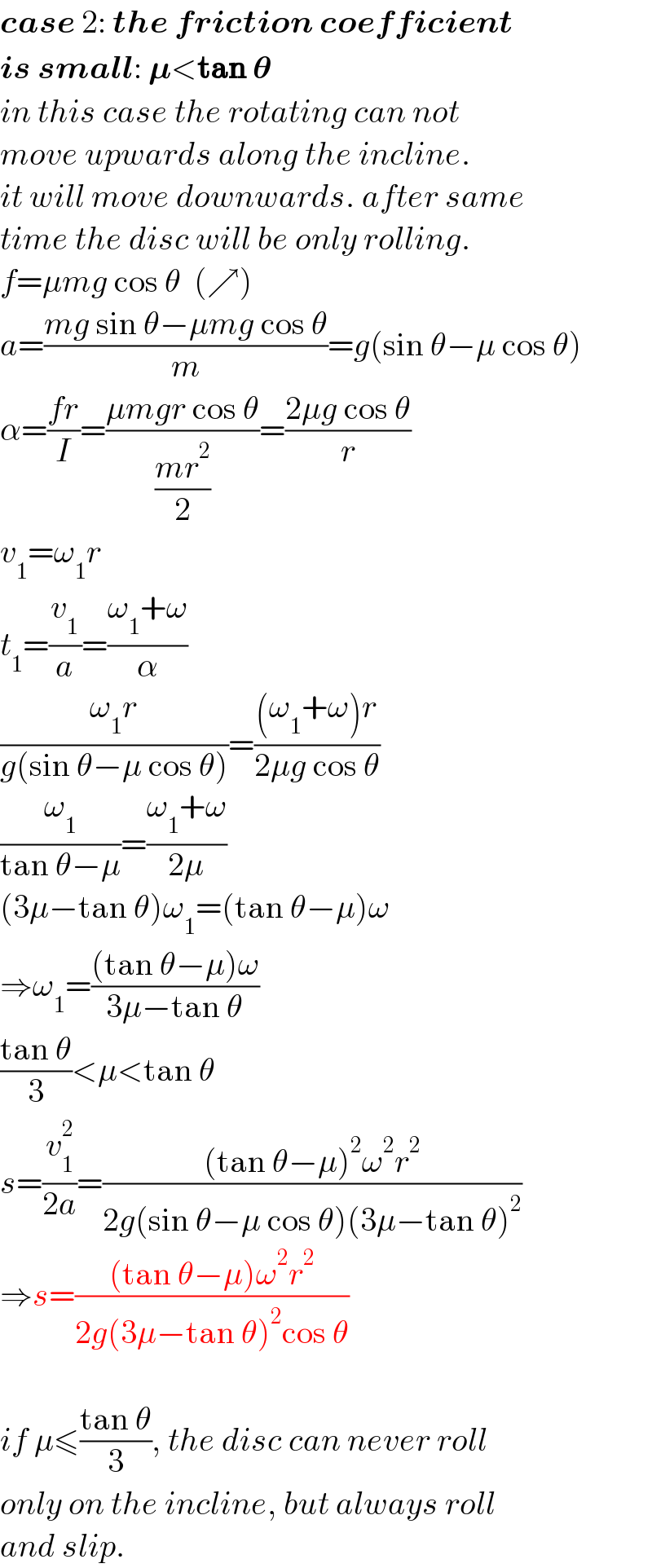
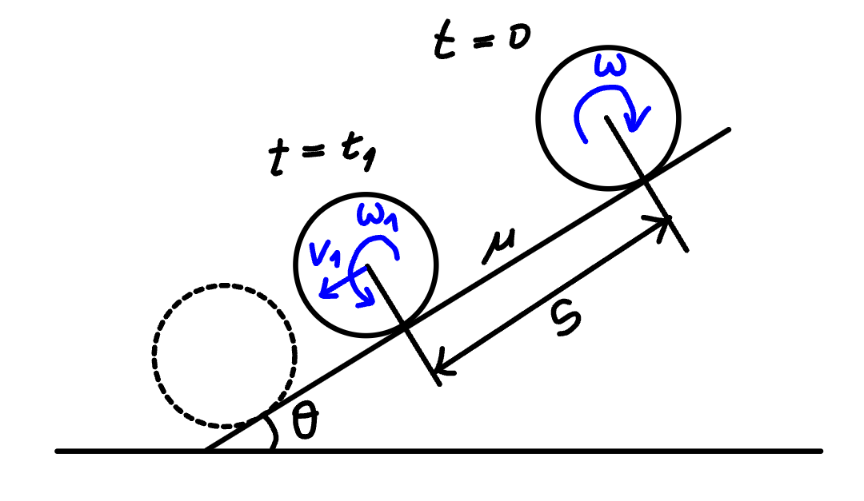
$$\boldsymbol{{case}}\:\mathrm{2}:\:\boldsymbol{{the}}\:\boldsymbol{{friction}}\:\boldsymbol{{coefficient}} \\ $$$$\boldsymbol{{is}}\:\boldsymbol{{small}}:\:\boldsymbol{\mu}<\boldsymbol{\mathrm{tan}}\:\boldsymbol{\theta} \\ $$$${in}\:{this}\:{case}\:{the}\:{rotating}\:{can}\:{not} \\ $$$${move}\:{upwards}\:{along}\:{the}\:{incline}. \\ $$$${it}\:{will}\:{move}\:{downwards}.\:{after}\:{same} \\ $$$${time}\:{the}\:{disc}\:{will}\:{be}\:{only}\:{rolling}. \\ $$$${f}=\mu{mg}\:\mathrm{cos}\:\theta\:\:\left(\nearrow\right) \\ $$$${a}=\frac{{mg}\:\mathrm{sin}\:\theta−\mu{mg}\:\mathrm{cos}\:\theta}{{m}}={g}\left(\mathrm{sin}\:\theta−\mu\:\mathrm{cos}\:\theta\right) \\ $$$$\alpha=\frac{{fr}}{{I}}=\frac{\mu{mgr}\:\mathrm{cos}\:\theta}{\frac{{mr}^{\mathrm{2}} }{\mathrm{2}}}=\frac{\mathrm{2}\mu{g}\:\mathrm{cos}\:\theta}{{r}} \\ $$$${v}_{\mathrm{1}} =\omega_{\mathrm{1}} {r} \\ $$$${t}_{\mathrm{1}} =\frac{{v}_{\mathrm{1}} }{{a}}=\frac{\omega_{\mathrm{1}} +\omega}{\alpha} \\ $$$$\frac{\omega_{\mathrm{1}} {r}}{{g}\left(\mathrm{sin}\:\theta−\mu\:\mathrm{cos}\:\theta\right)}=\frac{\left(\omega_{\mathrm{1}} +\omega\right){r}}{\mathrm{2}\mu{g}\:\mathrm{cos}\:\theta} \\ $$$$\frac{\omega_{\mathrm{1}} }{\mathrm{tan}\:\theta−\mu}=\frac{\omega_{\mathrm{1}} +\omega}{\mathrm{2}\mu} \\ $$$$\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)\omega_{\mathrm{1}} =\left(\mathrm{tan}\:\theta−\mu\right)\omega \\ $$$$\Rightarrow\omega_{\mathrm{1}} =\frac{\left(\mathrm{tan}\:\theta−\mu\right)\omega}{\mathrm{3}\mu−\mathrm{tan}\:\theta} \\ $$$$\frac{\mathrm{tan}\:\theta}{\mathrm{3}}<\mu<\mathrm{tan}\:\theta \\ $$$${s}=\frac{{v}_{\mathrm{1}} ^{\mathrm{2}} }{\mathrm{2}{a}}=\frac{\left(\mathrm{tan}\:\theta−\mu\right)^{\mathrm{2}} \omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{2}{g}\left(\mathrm{sin}\:\theta−\mu\:\mathrm{cos}\:\theta\right)\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} } \\ $$$$\Rightarrow{s}=\frac{\left(\mathrm{tan}\:\theta−\mu\right)\omega^{\mathrm{2}} {r}^{\mathrm{2}} }{\mathrm{2}{g}\left(\mathrm{3}\mu−\mathrm{tan}\:\theta\right)^{\mathrm{2}} \mathrm{cos}\:\theta} \\ $$$$ \\ $$$${if}\:\mu\leqslant\frac{\mathrm{tan}\:\theta}{\mathrm{3}},\:{the}\:{disc}\:{can}\:{never}\:{roll} \\ $$$${only}\:{on}\:{the}\:{incline},\:{but}\:{always}\:{roll} \\ $$$${and}\:{slip}. \\ $$
Commented by ajfour last updated on 15/Jan/25
https://youtu.be/-RRr7_nNNqI?si=mdeobU80KLO5c5m- A special case of a more general geometry question that mrW sir, MJS sir and myself had solved way back several yers.
Commented by mr W last updated on 15/Jan/25
��