

Question Number 214656 by mr W last updated on 15/Dec/24
Commented by mr W last updated on 17/Dec/24
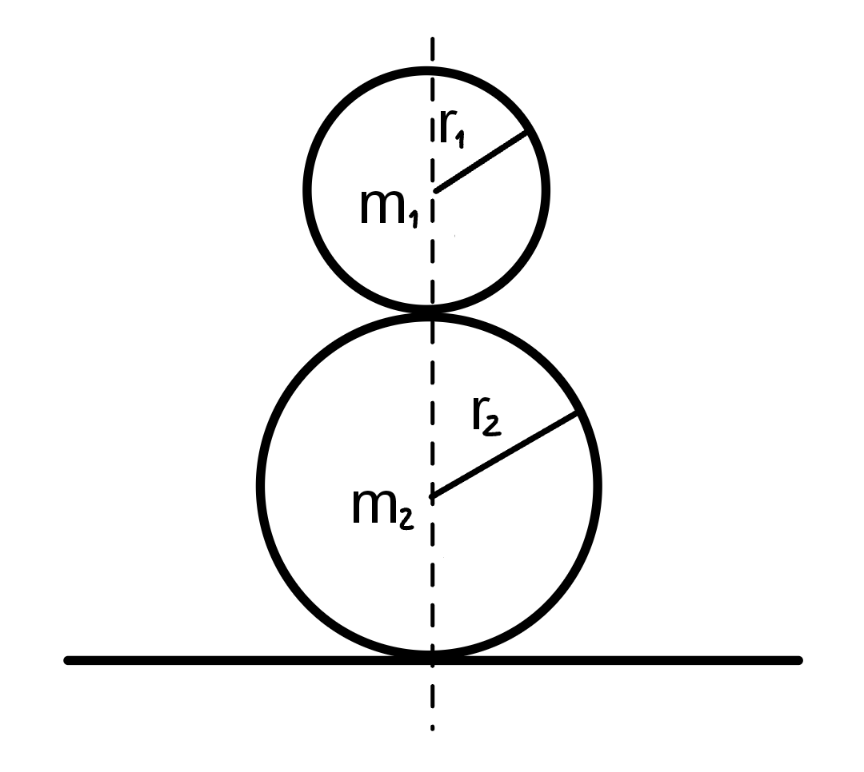
$${same}\:{conditions}\:{as}\:{in}\:{Q}\mathrm{214449} \\ $$$${find}\:{the}\:{final}\:{speed}\:{of}\:{the}\:{lower} \\ $$$${cylinder}. \\ $$
Answered by mr W last updated on 15/Dec/24
Commented by mr W last updated on 17/Dec/24
��
Commented by mr W last updated on 16/Dec/24
![(X, Y) =center of lower cylinder (x, y) =center of upper cylinder Y=r_2 x=X+(r_1 +r_2 ) sin θ y=r_2 +(r_1 +r_2 ) cos θ let ω=(dθ/dt) V_x =−(dX/dt)=U (←) V_y =0 (↓) v_x =(dx/dt)=−U+(r_1 +r_2 )ω cos θ (→) v_y =−(dy/dt)=(r_1 +r_2 )ω sin θ (↓) both cylinders obtain no rotation. let k=(m_2 /m_1 )+1 >1 m_2 U=m_1 v_x ((m_2 U)/m_1 )=v_x =−U+(r_1 +r_2 )ω cos θ ⇒U=(((r_1 +r_2 )ω cos θ)/k) loss in P.E.=gain in K.E. m_1 g(r_1 +r_2 )(1−cos θ)=((m_2 U^2 )/2)+((m_1 [−2U(r_1 +r_2 )ω cos θ+U^2 +(r_1 +r_2 )^2 ω^2 ])/2) 2g(r_1 +r_2 )(1−cos θ)=kU^2 −2U(r_1 +r_2 )ω cos θ+(r_1 +r_2 )^2 ω^2 2g(1−cos θ)=(1−((cos^2 θ)/k))(r_1 +r_2 )ω^2 ⇒ω^2 =((2kg(1−cos θ))/((r_1 +r_2 )(k−cos^2 θ))) ⇒ω(dω/dθ)=((gk(k−2 cos θ+cos^2 θ)sin θ)/((r_1 +r_2 )(k−cos^2 θ)^2 )) A_x =(dV_x /dt)=ω(dU/dθ)=(((r_1 +r_2 )ω)/k)(−ωsin θ+cos θ (dω/dθ)) A_x =g sin θ[((2k cos θ−2k−2 cos^3 θ+2 cos^2 θ+k cos θ−2 cos^2 θ+cos^3 θ)/((k−cos^2 θ)^2 ))] A_x =g sin θ[((−cos^3 θ+3k cos θ−2k)/((k−cos^2 θ)^2 ))] N sin θ=m_2 A_x ⇒(N/(m_2 g))=((−cos^3 θ+3k cos θ−2k)/((k−cos^2 θ)^2 )) N=0: cos^3 θ−3k cos θ+2k=0 ⇒cos θ=2(√k) sin ((1/3)sin^(−1) (1/( (√k)))) again we see that θ is independent from the radii of the cylinders, but only from the ratio of their masses. U=(((r_1 +r_2 )ω cos θ)/k) ⇒U=cos θ(√((2(1−cos θ))/(k(k−cos^2 θ))))(√(g(r_1 +r_2 )))](Q214669.png)
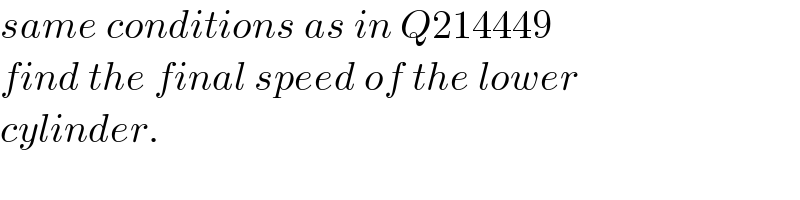
$$\left({X},\:{Y}\right)\:={center}\:{of}\:{lower}\:{cylinder} \\ $$$$\left({x},\:{y}\right)\:={center}\:{of}\:{upper}\:{cylinder} \\ $$$${Y}={r}_{\mathrm{2}} \\ $$$${x}={X}+\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\:\mathrm{sin}\:\theta \\ $$$${y}={r}_{\mathrm{2}} +\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\:\mathrm{cos}\:\theta \\ $$$${let}\:\omega=\frac{{d}\theta}{{dt}} \\ $$$${V}_{{x}} =−\frac{{dX}}{{dt}}={U}\:\:\:\:\left(\leftarrow\right) \\ $$$${V}_{{y}} =\mathrm{0}\:\:\:\:\:\:\left(\downarrow\right) \\ $$$${v}_{{x}} =\frac{{dx}}{{dt}}=−{U}+\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega\:\mathrm{cos}\:\theta\:\:\:\:\:\:\left(\rightarrow\right) \\ $$$${v}_{{y}} =−\frac{{dy}}{{dt}}=\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega\:\mathrm{sin}\:\theta\:\:\:\:\:\:\:\:\left(\downarrow\right) \\ $$$${both}\:{cylinders}\:{obtain}\:{no}\:{rotation}. \\ $$$${let}\:{k}=\frac{{m}_{\mathrm{2}} }{{m}_{\mathrm{1}} }+\mathrm{1}\:>\mathrm{1} \\ $$$${m}_{\mathrm{2}} {U}={m}_{\mathrm{1}} {v}_{{x}} \\ $$$$\frac{{m}_{\mathrm{2}} {U}}{{m}_{\mathrm{1}} }={v}_{{x}} =−{U}+\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega\:\mathrm{cos}\:\theta \\ $$$$\Rightarrow{U}=\frac{\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega\:\mathrm{cos}\:\theta}{{k}} \\ $$$${loss}\:{in}\:{P}.{E}.={gain}\:{in}\:{K}.{E}. \\ $$$${m}_{\mathrm{1}} {g}\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\left(\mathrm{1}−\mathrm{cos}\:\theta\right)=\frac{{m}_{\mathrm{2}} {U}^{\mathrm{2}} }{\mathrm{2}}+\frac{{m}_{\mathrm{1}} \left[−\mathrm{2}{U}\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega\:\mathrm{cos}\:\theta+{U}^{\mathrm{2}} +\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)^{\mathrm{2}} \omega^{\mathrm{2}} \right]}{\mathrm{2}} \\ $$$$\mathrm{2}{g}\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\left(\mathrm{1}−\mathrm{cos}\:\theta\right)={kU}^{\mathrm{2}} −\mathrm{2}{U}\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega\:\mathrm{cos}\:\theta+\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)^{\mathrm{2}} \omega^{\mathrm{2}} \\ $$$$\mathrm{2}{g}\left(\mathrm{1}−\mathrm{cos}\:\theta\right)=\left(\mathrm{1}−\frac{\mathrm{cos}^{\mathrm{2}} \:\theta}{{k}}\right)\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega^{\mathrm{2}} \\ $$$$\Rightarrow\omega^{\mathrm{2}} =\frac{\mathrm{2}{kg}\left(\mathrm{1}−\mathrm{cos}\:\theta\right)}{\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\left({k}−\mathrm{cos}^{\mathrm{2}} \:\theta\right)} \\ $$$$\Rightarrow\omega\frac{{d}\omega}{{d}\theta}=\frac{{gk}\left({k}−\mathrm{2}\:\mathrm{cos}\:\theta+\mathrm{cos}^{\mathrm{2}} \:\theta\right)\mathrm{sin}\:\theta}{\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\left({k}−\mathrm{cos}^{\mathrm{2}} \:\theta\right)^{\mathrm{2}} } \\ $$$${A}_{{x}} =\frac{{dV}_{{x}} }{{dt}}=\omega\frac{{dU}}{{d}\theta}=\frac{\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega}{{k}}\left(−\omega\mathrm{sin}\:\theta+\mathrm{cos}\:\theta\:\frac{{d}\omega}{{d}\theta}\right) \\ $$$${A}_{{x}} ={g}\:\mathrm{sin}\:\theta\left[\frac{\mathrm{2}{k}\:\mathrm{cos}\:\theta−\mathrm{2}{k}−\mathrm{2}\:\mathrm{cos}^{\mathrm{3}} \:\theta+\mathrm{2}\:\mathrm{cos}^{\mathrm{2}} \:\theta+{k}\:\mathrm{cos}\:\theta−\mathrm{2}\:\mathrm{cos}^{\mathrm{2}} \:\theta+\mathrm{cos}^{\mathrm{3}} \:\theta}{\left({k}−\mathrm{cos}^{\mathrm{2}} \:\theta\right)^{\mathrm{2}} }\right] \\ $$$${A}_{{x}} ={g}\:\mathrm{sin}\:\theta\left[\frac{−\mathrm{cos}^{\mathrm{3}} \:\theta+\mathrm{3}{k}\:\mathrm{cos}\:\theta−\mathrm{2}{k}}{\left({k}−\mathrm{cos}^{\mathrm{2}} \:\theta\right)^{\mathrm{2}} }\right] \\ $$$${N}\:\mathrm{sin}\:\theta={m}_{\mathrm{2}} {A}_{{x}} \\ $$$$\Rightarrow\frac{{N}}{{m}_{\mathrm{2}} {g}}=\frac{−\mathrm{cos}^{\mathrm{3}} \:\theta+\mathrm{3}{k}\:\mathrm{cos}\:\theta−\mathrm{2}{k}}{\left({k}−\mathrm{cos}^{\mathrm{2}} \:\theta\right)^{\mathrm{2}} } \\ $$$${N}=\mathrm{0}: \\ $$$$\mathrm{cos}^{\mathrm{3}} \:\theta−\mathrm{3}{k}\:\mathrm{cos}\:\theta+\mathrm{2}{k}=\mathrm{0} \\ $$$$\Rightarrow\mathrm{cos}\:\theta=\mathrm{2}\sqrt{{k}}\:\mathrm{sin}\:\left(\frac{\mathrm{1}}{\mathrm{3}}\mathrm{sin}^{−\mathrm{1}} \frac{\mathrm{1}}{\:\sqrt{{k}}}\right) \\ $$$${again}\:{we}\:{see}\:{that}\:\theta\:{is}\:{independent} \\ $$$${from}\:{the}\:{radii}\:{of}\:{the}\:{cylinders},\:{but} \\ $$$${only}\:{from}\:{the}\:{ratio}\:{of}\:{their}\:{masses}. \\ $$$${U}=\frac{\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)\omega\:\mathrm{cos}\:\theta}{{k}} \\ $$$$\Rightarrow{U}=\mathrm{cos}\:\theta\sqrt{\frac{\mathrm{2}\left(\mathrm{1}−\mathrm{cos}\:\theta\right)}{{k}\left({k}−\mathrm{cos}^{\mathrm{2}} \:\theta\right)}}\sqrt{{g}\left({r}_{\mathrm{1}} +{r}_{\mathrm{2}} \right)} \\ $$
Commented by mr W last updated on 16/Dec/24
Commented by mr W last updated on 16/Dec/24
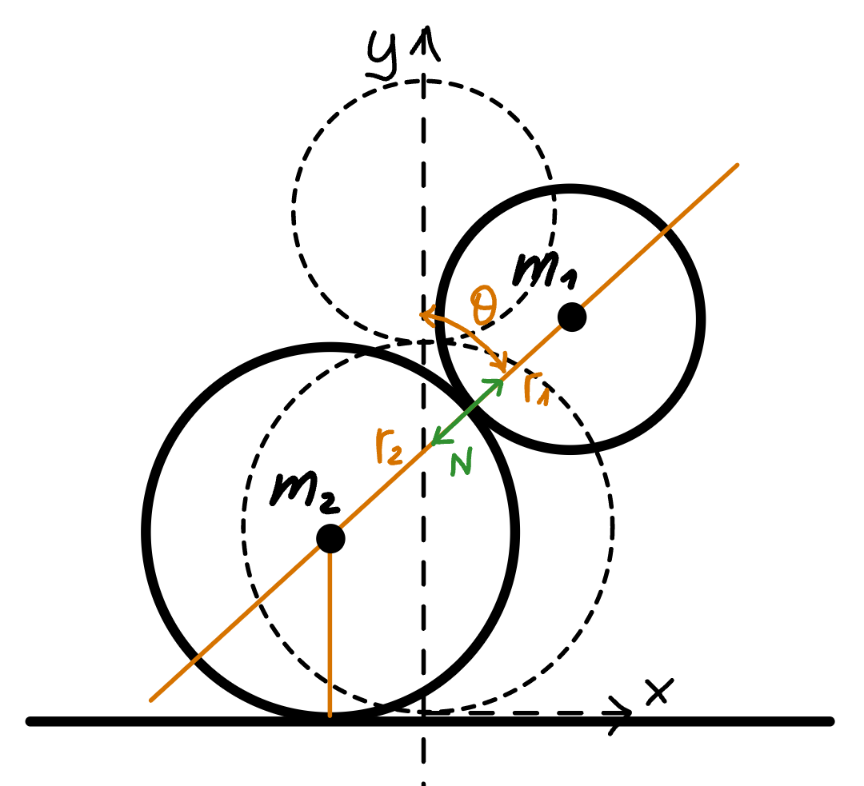
$${this}\:{picture}\:{shows}\:{what}\:{motions} \\ $$$${the}\:{cylinders}\:{make}. \\ $$$$\underline{{from}\:{t}=\mathrm{0}\:{to}\:{t}_{\mathrm{1}} :\:} \\ $$$${the}\:{cylinders}\:{have}\:{contact}\:{to}\:{each} \\ $$$${other}.\:{the}\:{upper}\:{cylinder}\:{pushes}\: \\ $$$${the}\:{lower}\:{one}\:{towards}\:{left}\:{and}\: \\ $$$${makes}\:{this}\:{to}\:{movefaster}\:{and}\:{faster}. \\ $$$${N}>\mathrm{0} \\ $$$$\underline{{at}\:{t}={t}_{\mathrm{1}} :} \\ $$$${the}\:{contact}\:{between}\:{the}\:{cylinders} \\ $$$${breaks}.\: \\ $$$${N}=\mathrm{0}. \\ $$$$\underline{{after}\:{t}={t}_{\mathrm{1}} :} \\ $$$${the}\:{cylinders}\:{move}\:{independently}\: \\ $$$${from}\:{each}\:{other}.\:{the}\:{lower}\:{one} \\ $$$${moves}\:{with}\:{contant}\:{speeed}\:{towards} \\ $$$${left}.\:{the}\:{upper}\:{one}\:{moves}\:{towards} \\ $$$${right}\:{and}\:{falls}\:{onto}\:{the}\:{ground}\:{and} \\ $$$${rebounds}\:{from}\:{the}\:{ground}\:{again}\: \\ $$$${and}\:{repeats}\:{this}\:{on}\:{and}\:{on}..... \\ $$
Commented by ajfour last updated on 16/Dec/24
$${Looks}\:{marvellous}!\:{what}\:{a}\:{fine} \\ $$$${treatment},\:{i}\:{shall}\:{look}\:{into}\:{the}\: \\ $$$${details}.\:{great}\:{work}\:{sir}. \\ $$
Commented by mr W last updated on 16/Dec/24
$${i}\:{used}\:{my}\:{standard}\:{method}.\:{i}\:{hope} \\ $$$${you}\:{also}\:{get}\:{this}\:{result}\:{using}\:{your} \\ $$$${method}. \\ $$
Commented by ajfour last updated on 16/Dec/24
https://youtu.be/ANHpcwzc_BM?si=ociiHdkc2qWXLw_5