

Question Number 214132 by ajfour last updated on 29/Nov/24

Answered by MathematicalUser2357 last updated on 29/Nov/24
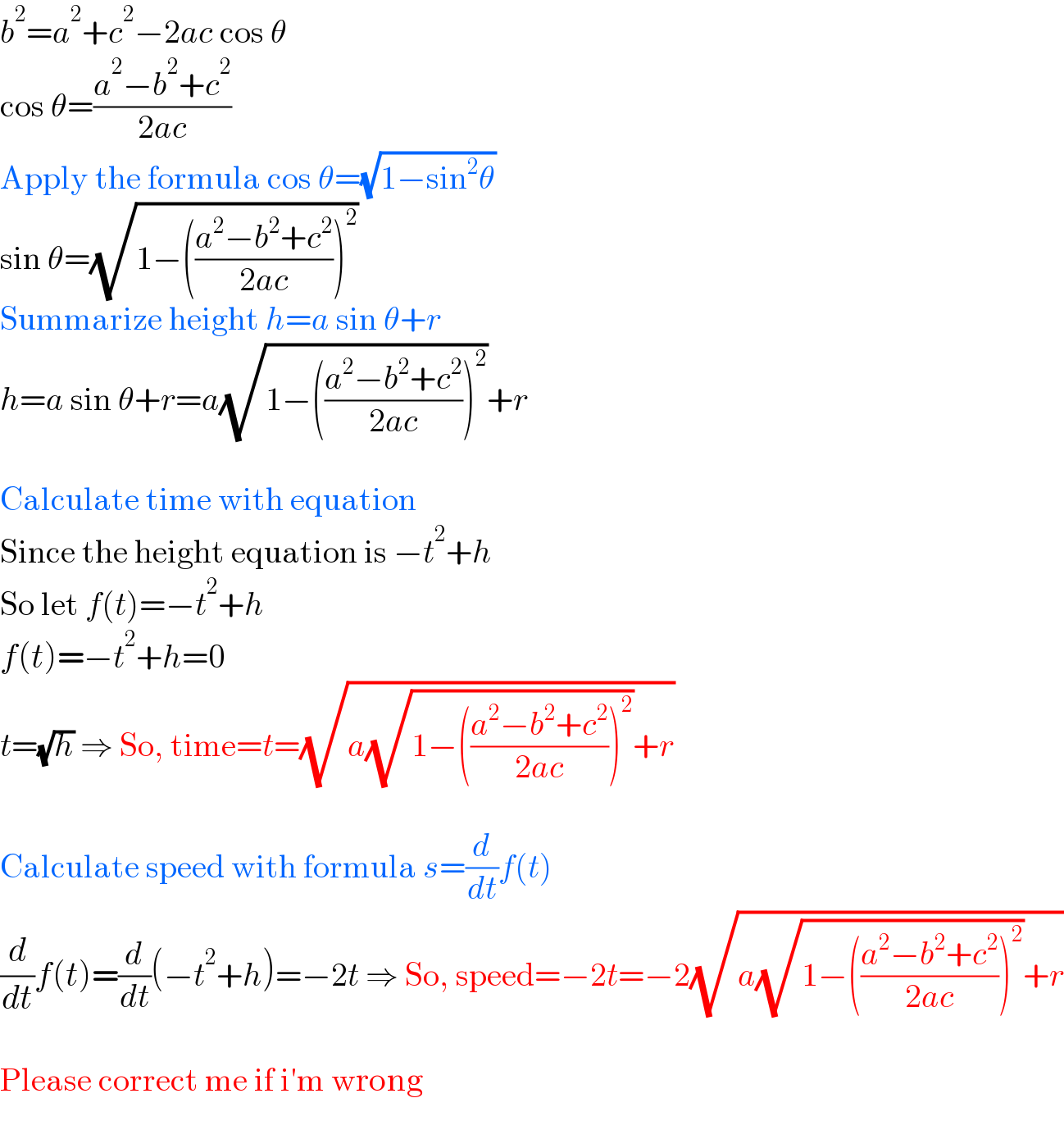
$${b}^{\mathrm{2}} ={a}^{\mathrm{2}} +{c}^{\mathrm{2}} −\mathrm{2}{ac}\:\mathrm{cos}\:\theta \\ $$$$\mathrm{cos}\:\theta=\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}} \\ $$$$\mathrm{Apply}\:\mathrm{the}\:\mathrm{formula}\:\mathrm{cos}\:\theta=\sqrt{\mathrm{1}−\mathrm{sin}^{\mathrm{2}} \theta} \\ $$$$\mathrm{sin}\:\theta=\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} } \\ $$$$\mathrm{Summarize}\:\mathrm{height}\:{h}={a}\:\mathrm{sin}\:\theta+{r} \\ $$$${h}={a}\:\mathrm{sin}\:\theta+{r}={a}\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} }+{r} \\ $$$$ \\ $$$$\mathrm{Calculate}\:\mathrm{time}\:\mathrm{with}\:\mathrm{equation} \\ $$$$\mathrm{Since}\:\mathrm{the}\:\mathrm{height}\:\mathrm{equation}\:\mathrm{is}\:−{t}^{\mathrm{2}} +{h} \\ $$$$\mathrm{So}\:\mathrm{let}\:{f}\left({t}\right)=−{t}^{\mathrm{2}} +{h} \\ $$$${f}\left({t}\right)=−{t}^{\mathrm{2}} +{h}=\mathrm{0} \\ $$$${t}=\sqrt{{h}}\:\Rightarrow\:\mathrm{So},\:\mathrm{time}={t}=\sqrt{{a}\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} }+{r}} \\ $$$$ \\ $$$$\mathrm{Calculate}\:\mathrm{speed}\:\mathrm{with}\:\mathrm{formula}\:{s}=\frac{{d}}{{dt}}{f}\left({t}\right) \\ $$$$\frac{{d}}{{dt}}{f}\left({t}\right)=\frac{{d}}{{dt}}\left(−{t}^{\mathrm{2}} +{h}\right)=−\mathrm{2}{t}\:\Rightarrow\:\mathrm{So},\:\mathrm{speed}=−\mathrm{2}{t}=−\mathrm{2}\sqrt{{a}\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} }+{r}} \\ $$$$ \\ $$$$\mathrm{Please}\:\mathrm{correct}\:\mathrm{me}\:\mathrm{if}\:\mathrm{i}'\mathrm{m}\:\mathrm{wrong} \\ $$
Commented by MathematicalUser2357 last updated on 29/Nov/24
Commented by ajfour last updated on 29/Nov/24

$$−{t}^{\mathrm{2}} +{h}=\mathrm{0} \\ $$$${how}? \\ $$$$ \\ $$
Commented by MathematicalUser2357 last updated on 29/Nov/24
$$\mathrm{Since}\:\mathrm{the}\:\mathrm{height}\:\mathrm{equation}\:\mathrm{is}\:−{t}^{\mathrm{2}} +{h},\:\mathrm{So}\:\mathrm{let}\:{f}\left({t}\right)=−{t}^{\mathrm{2}} +{h} \\ $$$$\mathrm{Plus},\:\mathrm{to}\:\mathrm{the}\:\mathrm{gravity}\:\mathrm{law},\:\mathrm{the}\:\mathrm{height}\:\mathrm{equation}\:\mathrm{is}\:{y}=−{t}^{\mathrm{2}} +{h} \\ $$
Commented by ajfour last updated on 29/Nov/24
$${Its}\:{not}\:{a}\:{free}\:{fall}.. \\ $$
Commented by MathematicalUser2357 last updated on 01/Dec/24
$$\mathrm{Then}\:\mathrm{linear}\:\mathrm{motion}? \\ $$$$\begin{cases}{{x}_{\mathrm{0}} ={a}\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} }+{r}}\\{{x}=\mathrm{0}}\\{{v}_{\mathrm{0}} =\mathrm{0}}\\{{v}=\alpha{t}}\end{cases} \\ $$$$\begin{cases}{{x}={a}\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} }+{r}+\frac{\mathrm{1}}{\mathrm{2}}\alpha{t}^{\mathrm{2}} }\\{{x}={a}\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} }+{r}+{vt}−\frac{\mathrm{1}}{\mathrm{2}}\alpha{t}^{\mathrm{2}} }\\{{x}={a}\sqrt{\mathrm{1}−\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} +{c}^{\mathrm{2}} }{\mathrm{2}{ac}}\right)^{\mathrm{2}} }+{r}+\frac{\mathrm{1}}{\mathrm{2}}{vt}}\end{cases} \\ $$$${uh}- \\ $$
Commented by mr W last updated on 01/Dec/24
Commented by mr W last updated on 03/Dec/24
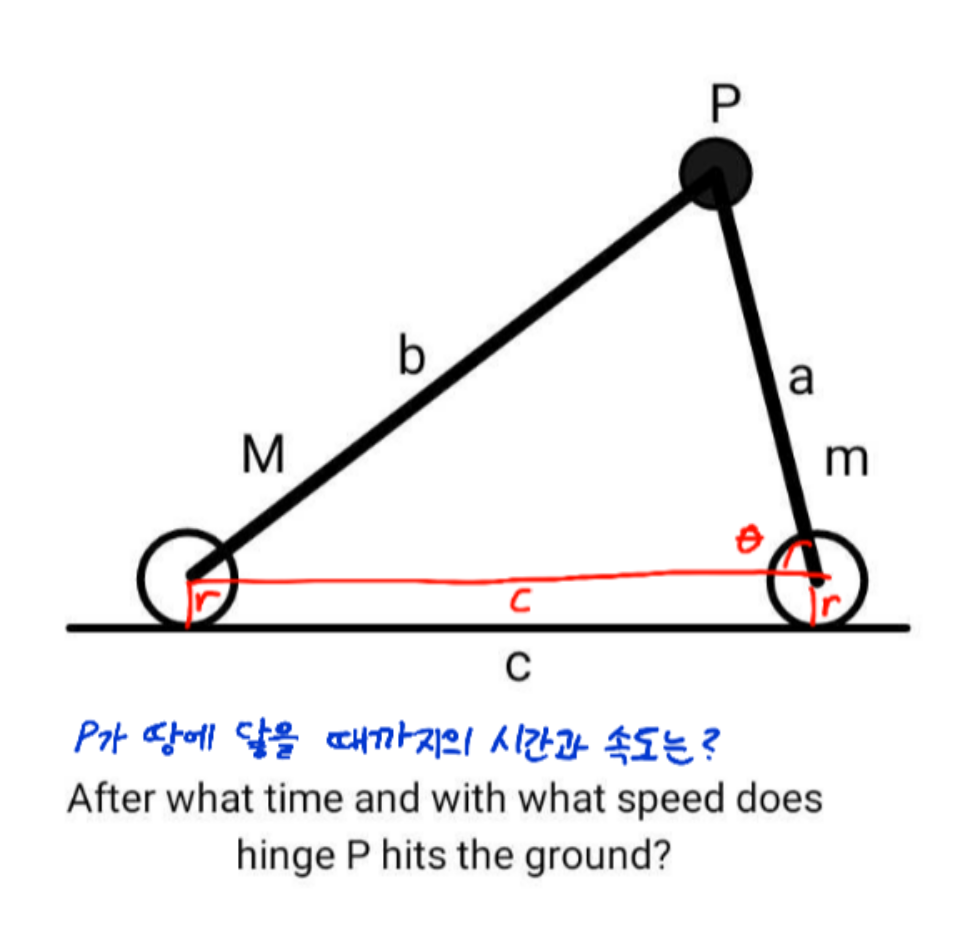
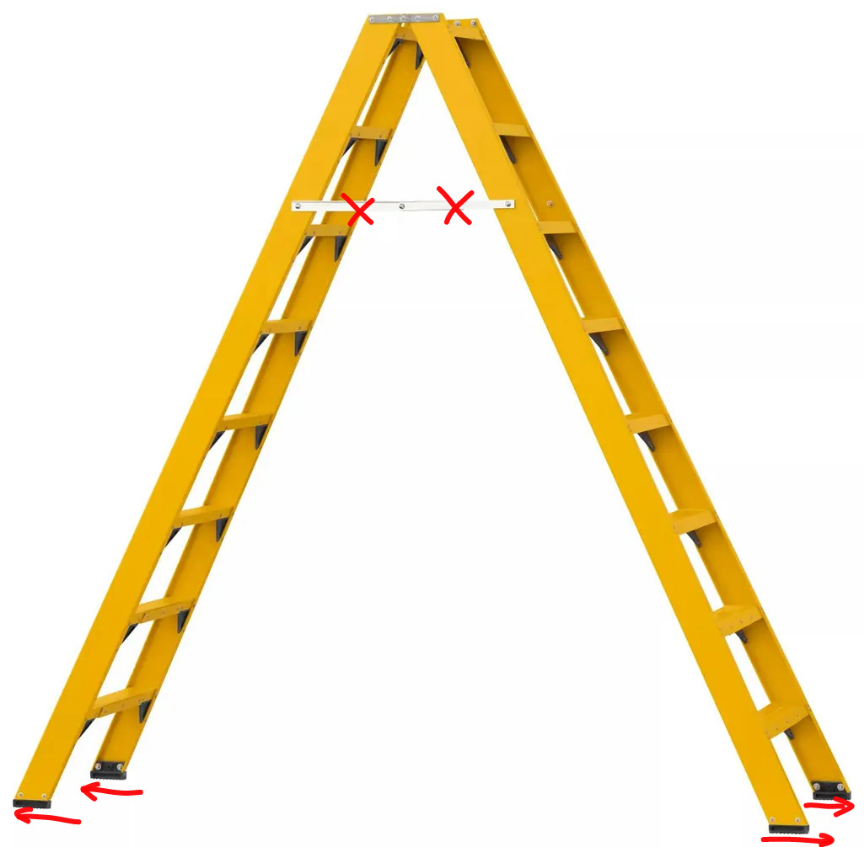
$${this}\:{pucture}\:{shows}\:{the}\: \\ $$$${motions}\:{described}\:{in}\:{this}\:{question}. \\ $$$${for}\:{example}\:{you}\:{are}\:{standing}\:{on} \\ $$$${the}\:{top}\:{of}\:{such}\:{a}\:{twin}\:{ladder}.\: \\ $$$${sudently}\:{the}\:{spreaders}\:{connecting}\: \\ $$$${the}\:{ladders}\:{are}\:{brocken}...\: \\ $$$${the}\:{question}\:{is}\:{with}\:{what}\:{speed}\:{you} \\ $$$${hit}\:{the}\:{floor}\:{and}\:{what}\:{time}\:{do}\:{you} \\ $$$${take}. \\ $$$${the}\:{floor}\:{is}\:{slippery},\:{no}\:{friction}. \\ $$$${i}\:{hope}\:{you}\:{didn}'{t}\:{get}\:{seriouly}\:{injured}. \\ $$
Answered by mr W last updated on 01/Dec/24
Commented by mr W last updated on 01/Dec/24

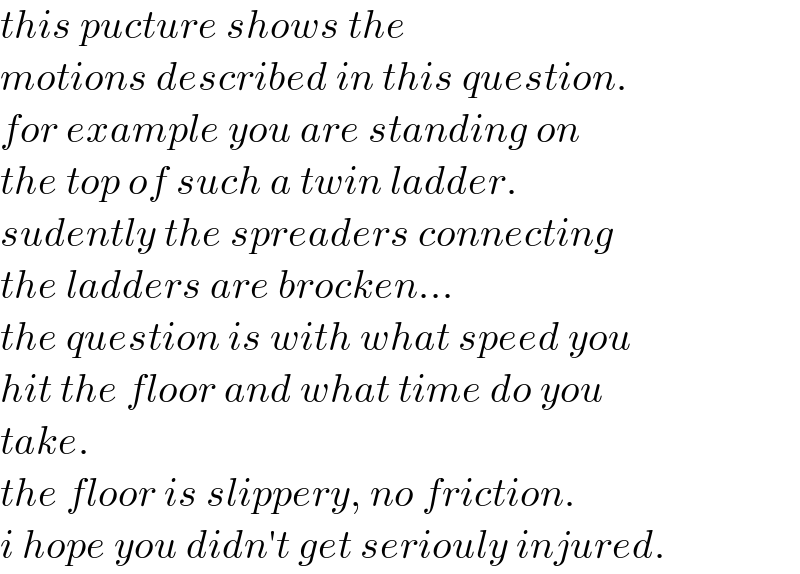
$${rods}\:{have}\:{uniform}\:{mass}\:{distribution}. \\ $$$${rod}\:{AP}:\:{length}\:{a},\:{mass}\:{m}_{\mathrm{1}} \\ $$$${rod}\:{BP}:\:{length}\:{b},\:{mass}\:{m}_{\mathrm{2}} \\ $$$${M}={m}_{\mathrm{1}} +{m}_{\mathrm{2}} \\ $$$${say}\:\mu_{\mathrm{1}} =\frac{{m}_{\mathrm{1}} }{{M}},\:\mu_{\mathrm{2}} =\frac{{m}_{\mathrm{2}} }{{M}} \\ $$$${C}={center}\:{of}\:{mass}\:{of}\:{both}\:{rods}\:{together} \\ $$$${h}_{{C}} ={height}\:{of}\:{C}\:{above}\:{ground}=\frac{{h}}{\mathrm{2}} \\ $$$$ \\ $$$${at}\:{t}=\mathrm{0}: \\ $$$$\theta=\theta_{\mathrm{0}} =\mathrm{cos}^{−\mathrm{1}} \frac{{a}^{\mathrm{2}} +{b}^{\mathrm{2}} −{c}^{\mathrm{2}} }{\mathrm{2}{ab}} \\ $$$$\frac{{h}_{\mathrm{0}} {c}}{\mathrm{2}}=\Delta_{{ABP}} =\frac{\sqrt{\left({a}+{b}+{c}\right)\left(−{a}+{b}+{c}\right)\left({a}−{b}+{c}\right)\left({a}+{b}−{c}\right)}}{\mathrm{4}} \\ $$$$\Rightarrow{h}_{\mathrm{0}} =\frac{\sqrt{\left({a}+{b}+{c}\right)\left(−{a}+{b}+{c}\right)\left({a}−{b}+{c}\right)\left({a}+{b}−{c}\right)}}{\mathrm{2}{c}} \\ $$$${h}_{{C}\mathrm{0}} =\frac{{h}_{\mathrm{0}} }{\mathrm{2}} \\ $$$$ \\ $$$${at}\:{t}={T}: \\ $$$$\theta=\pi=\mathrm{180}° \\ $$$$ \\ $$$${at}\:{t}: \\ $$$${let}\:\omega=\frac{{d}\theta}{{dt}} \\ $$$${E},\:{F}\:{are}\:{mass}\:{centers}\:{of}\:{rods} \\ $$$${EP}=\frac{{a}}{\mathrm{2}},\:{FP}=\frac{{b}}{\mathrm{2}} \\ $$$${AB}={l}=\sqrt{{a}^{\mathrm{2}} +{b}^{\mathrm{2}} −\mathrm{2}{ab}\:\mathrm{cos}\:\theta} \\ $$$$\frac{{dl}}{{d}\theta}=\frac{{ab}\:\mathrm{sin}\:\theta}{\:\sqrt{{a}^{\mathrm{2}} +{b}^{\mathrm{2}} −\mathrm{2}{ab}\:\mathrm{cos}\:\theta}}=\frac{{ab}\:\mathrm{sin}\:\theta}{{l}} \\ $$$${EF}=\frac{{l}}{\mathrm{2}} \\ $$$${EC}={l}_{\mathrm{1}} =\frac{{m}_{\mathrm{2}} }{{m}_{\mathrm{1}} +{m}_{\mathrm{2}} }×{EF}=\frac{{m}_{\mathrm{2}} {l}}{\mathrm{2}{M}} \\ $$$${FC}={l}_{\mathrm{2}} =\frac{{m}_{\mathrm{1}} }{{m}_{\mathrm{1}} +{m}_{\mathrm{2}} }×{EF}=\frac{{m}_{\mathrm{1}} {l}}{\mathrm{2}{M}} \\ $$$${point}\:{C}\:{moves}\:{only}\:{in}\:{vertical} \\ $$$${direction},\:{because}\:{no}\:{force}\:{is}\:{acting} \\ $$$${in}\:{horizontal}\:{direction}. \\ $$$$\omega_{\mathrm{1}} =\frac{{d}\varphi_{\mathrm{1}} }{{dt}}=\frac{{d}\varphi_{\mathrm{1}} }{{d}\theta}×\frac{{d}\theta}{{dt}}=\omega\frac{{d}\varphi_{\mathrm{1}} }{{d}\theta} \\ $$$$\omega_{\mathrm{2}} =\frac{{d}\varphi_{\mathrm{2}} }{{dt}}=\frac{{d}\varphi_{\mathrm{2}} }{{d}\theta}×\frac{{d}\theta}{{dt}}=\omega\frac{{d}\varphi_{\mathrm{2}} }{{d}\theta} \\ $$$$\frac{\mathrm{sin}\:\varphi_{\mathrm{1}} }{{b}}=\frac{\mathrm{sin}\:\varphi_{\mathrm{2}} }{{a}}=\frac{\mathrm{sin}\:\theta}{\:{l}} \\ $$$$\frac{\mathrm{cos}\:\varphi_{\mathrm{1}} }{{b}}×\frac{{d}\varphi_{\mathrm{1}} }{{d}\theta}=\frac{\mathrm{cos}\:\varphi_{\mathrm{2}} }{{a}}×\frac{{d}\varphi_{\mathrm{2}} }{{d}\theta}=\frac{\mathrm{cos}\:\theta}{{l}}−\frac{\mathrm{sin}\:\theta}{{l}^{\mathrm{2}} }×\frac{{dl}}{{d}\theta} \\ $$$$\frac{\mathrm{cos}\:\varphi_{\mathrm{1}} }{{b}}×\frac{\omega_{\mathrm{1}} }{\omega}=\frac{\mathrm{cos}\:\varphi_{\mathrm{2}} }{{a}}×\frac{\omega_{\mathrm{2}} }{\omega}=\frac{\mathrm{cos}\:\theta}{{l}}−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{3}} } \\ $$$$\omega_{\mathrm{1}} =\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)\frac{\omega{b}}{{l}\:\mathrm{cos}\:\varphi_{\mathrm{1}} } \\ $$$$\omega_{\mathrm{1}} =\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)\frac{\omega{b}}{\:{l}\sqrt{\mathrm{1}−\:\mathrm{sin}^{\mathrm{2}} \:\varphi_{\mathrm{1}} }} \\ $$$$\Rightarrow\omega_{\mathrm{1}} =\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)\frac{\omega}{\:\sqrt{\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}} \\ $$$${similarly} \\ $$$$\Rightarrow\omega_{\mathrm{2}} =\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)\frac{\omega}{\:\sqrt{\frac{{l}^{\mathrm{2}} }{{a}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}} \\ $$$$\frac{\mathrm{2}{h}_{{C}} {l}}{\mathrm{2}}=\frac{{ab}\:\mathrm{sin}\:\theta}{\mathrm{2}}=\Delta_{{ABP}} \\ $$$$\Rightarrow{h}_{{C}} =\frac{{ab}\:\mathrm{sin}\:\theta}{\mathrm{2}{l}} \\ $$$$\frac{{dh}_{{C}} }{{d}\theta}=\frac{{ab}}{\mathrm{2}}\left(\frac{\mathrm{cos}\:\theta}{{l}}−\frac{\mathrm{sin}\:\theta}{{l}^{\mathrm{2}} }×\frac{{dl}}{{d}\theta}\right)=\frac{{ab}}{\mathrm{2}{l}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right) \\ $$$${u}_{\mathrm{1}{x}} =\frac{{dl}_{\mathrm{1}} }{{dt}}=\frac{{m}_{\mathrm{2}} \omega}{\mathrm{2}{M}}×\frac{{dl}}{{d}\theta}=\frac{{m}_{\mathrm{2}} \omega{ab}\:\mathrm{sin}\:\theta}{\mathrm{2}{Ml}} \\ $$$${u}_{\mathrm{2}{x}} =\frac{{dl}_{\mathrm{2}} }{{dt}}=\frac{{m}_{\mathrm{1}} \omega}{\mathrm{2}{M}}×\frac{{dl}}{{d}\theta}=\frac{{m}_{\mathrm{1}} \omega{ab}\:\mathrm{sin}\:\theta}{\mathrm{2}{Ml}} \\ $$$${u}_{\mathrm{1}{y}} ={u}_{\mathrm{2}{y}} =−\frac{{dh}_{{C}} }{{dt}}=−\omega\frac{{dh}_{{C}} }{{d}\theta}=−\frac{\omega{ab}}{\mathrm{2}{l}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right) \\ $$$${loss}\:{of}\:{P}.{E}.={gain}\:{of}\:{K}.{E}. \\ $$$${Mg}\left({h}_{{C}\mathrm{0}} −{h}_{{C}} \right)=\frac{\mathrm{1}}{\mathrm{2}}{m}_{\mathrm{1}} \left({u}_{\mathrm{1}{x}} ^{\mathrm{2}} +{u}_{\mathrm{1}{y}} ^{\mathrm{2}} \right)+\frac{\mathrm{1}}{\mathrm{2}}×\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} \omega_{\mathrm{1}} ^{\mathrm{2}} }{\mathrm{12}} \\ $$$$\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:+\frac{\mathrm{1}}{\mathrm{2}}{m}_{\mathrm{2}} \left({u}_{\mathrm{2}{x}} ^{\mathrm{2}} +{u}_{\mathrm{2}{y}} ^{\mathrm{2}} \right)+\frac{\mathrm{1}}{\mathrm{2}}×\frac{{m}_{\mathrm{2}} {b}^{\mathrm{2}} \omega_{\mathrm{2}} ^{\mathrm{2}} }{\mathrm{12}} \\ $$$$\mathrm{2}{Mg}\left({h}_{{C}\mathrm{0}} −{h}_{{C}} \right)={Mu}_{\mathrm{1}{y}} ^{\mathrm{2}} +{m}_{\mathrm{1}} {u}_{\mathrm{1}{x}} ^{\mathrm{2}} +{m}_{\mathrm{2}} {u}_{\mathrm{2}{x}} ^{\mathrm{2}} +\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} \omega_{\mathrm{1}} ^{\mathrm{2}} }{\mathrm{12}}+\frac{{m}_{\mathrm{2}} {b}^{\mathrm{2}} \omega_{\mathrm{2}} ^{\mathrm{2}} }{\mathrm{12}} \\ $$$$\mathrm{2}{Mg}\left({h}_{{C}\mathrm{0}} −{h}_{{C}} \right)={M}\left(\frac{\omega{ab}}{\mathrm{2}{l}}\right)^{\mathrm{2}} \left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} +\left({m}_{\mathrm{1}} {m}_{\mathrm{2}} ^{\mathrm{2}} +{m}_{\mathrm{2}} {m}_{\mathrm{1}} ^{\mathrm{2}} \right)\left(\frac{\omega{ab}\:\mathrm{sin}\:\theta}{\mathrm{2}{Ml}}\right)^{\mathrm{2}} \\ $$$$\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:+\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} }{\mathrm{12}}×\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{\omega^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}\right)+\frac{{m}_{\mathrm{2}} {b}^{\mathrm{2}} }{\mathrm{12}}×\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{\omega^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}\right) \\ $$$$\mathrm{8}{Mg}\left({h}_{{C}\mathrm{0}} −\frac{{ab}\:\mathrm{sin}\:\theta}{\mathrm{2}{l}}\right)=\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} ×\frac{{Ma}^{\mathrm{2}} {b}^{\mathrm{2}} \omega^{\mathrm{2}} }{{l}^{\mathrm{2}} }+\frac{{m}_{\mathrm{1}} {m}_{\mathrm{2}} {a}^{\mathrm{2}} {b}^{\mathrm{2}} \omega^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}{{Ml}^{\mathrm{2}} } \\ $$$$\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:\:+\frac{\mathrm{1}}{\mathrm{3}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{{m}_{\mathrm{2}} {b}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}\right)\omega^{\mathrm{2}} \\ $$$$\mathrm{4}{Mg}\left({h}_{\mathrm{0}} −\frac{{ab}\:\mathrm{sin}\:\theta}{{l}}\right)=\frac{{m}_{\mathrm{1}} {m}_{\mathrm{2}} {a}^{\mathrm{2}} {b}^{\mathrm{2}} \omega^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}{{Ml}^{\mathrm{2}} }+\frac{\mathrm{1}}{\mathrm{3}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{{m}_{\mathrm{2}} {b}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{a}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mathrm{3}{Ma}^{\mathrm{2}} {b}^{\mathrm{2}} }{{l}^{\mathrm{2}} }\right)\omega^{\mathrm{2}} \\ $$$$\omega^{\mathrm{2}} =\frac{\mathrm{4}{Mg}\left({h}_{\mathrm{0}} −\frac{{ab}\:\mathrm{sin}\:\theta}{{l}}\right)}{\frac{{m}_{\mathrm{1}} {m}_{\mathrm{2}} {a}^{\mathrm{2}} {b}^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}{{Ml}^{\mathrm{2}} }+\frac{\mathrm{1}}{\mathrm{3}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{{m}_{\mathrm{2}} {b}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{a}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mathrm{3}{Ma}^{\mathrm{2}} {b}^{\mathrm{2}} }{{l}^{\mathrm{2}} }\right)} \\ $$$$\omega=\sqrt{\frac{\mathrm{4}{Mg}\left({h}_{\mathrm{0}} −\frac{{ab}\:\mathrm{sin}\:\theta}{{l}}\right)}{\frac{{m}_{\mathrm{1}} {m}_{\mathrm{2}} {a}^{\mathrm{2}} {b}^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}{{Ml}^{\mathrm{2}} }+\frac{\mathrm{1}}{\mathrm{3}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{{m}_{\mathrm{2}} {b}^{\mathrm{2}} }{\:\frac{{l}^{\mathrm{2}} }{{a}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mathrm{3}{Ma}^{\mathrm{2}} {b}^{\mathrm{2}} }{{l}^{\mathrm{2}} }\right)}} \\ $$$$\Rightarrow\omega=\frac{\mathrm{1}}{{ab}}\sqrt{\frac{\mathrm{4}{g}\left({h}_{\mathrm{0}} −\frac{{ab}\:\mathrm{sin}\:\theta}{{l}}\right)}{\frac{\mu_{\mathrm{1}} \mu_{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }+\frac{\mathrm{1}}{\mathrm{3}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{\mu_{\mathrm{1}} }{\:{l}^{\mathrm{2}} −{b}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mu_{\mathrm{2}} }{\:{l}^{\mathrm{2}} −{a}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mathrm{3}}{{l}^{\mathrm{2}} }\right)}} \\ $$$${dt}=\frac{{d}\theta}{\omega} \\ $$$${dt}={ab}\sqrt{\frac{\frac{\mu_{\mathrm{1}} \mu_{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }+\frac{\mathrm{1}}{\mathrm{3}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{\mu_{\mathrm{1}} }{\:{l}^{\mathrm{2}} −{b}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mu_{\mathrm{2}} }{\:{l}^{\mathrm{2}} −{a}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mathrm{3}}{{l}^{\mathrm{2}} }\right)}{\mathrm{4}{g}\left({h}_{\mathrm{0}} −\frac{{ab}\:\mathrm{sin}\:\theta}{{l}}\right)}}{d}\theta \\ $$$${T}={ab}\int_{\theta_{\mathrm{0}} } ^{\pi} \sqrt{\frac{\frac{\mu_{\mathrm{1}} \mu_{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }+\frac{\mathrm{1}}{\mathrm{3}}\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)^{\mathrm{2}} \left(\frac{\mu_{\mathrm{1}} }{\:{l}^{\mathrm{2}} −{b}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mu_{\mathrm{2}} }{\:{l}^{\mathrm{2}} −{a}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}+\frac{\mathrm{3}}{{l}^{\mathrm{2}} }\right)}{\mathrm{4}{g}\left({h}_{\mathrm{0}} −\frac{{ab}\:\mathrm{sin}\:\theta}{{l}}\right)}}{d}\theta \\ $$$${u}_{{Py}} ={a}\:\mathrm{cos}\:\varphi_{\mathrm{1}} \:\omega_{\mathrm{1}} ={a}\left(\frac{\mathrm{cos}\:\theta}{{l}}−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{3}} }\right){b}\omega \\ $$$$\Rightarrow{u}_{{Py}} =\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)\frac{\omega{ab}}{\:{l}} \\ $$$$ \\ $$$${at}\:{t}={T}: \\ $$$$\theta=\pi \\ $$$$\omega=\frac{\left({a}+{b}\right)\sqrt{\mathrm{3}{gh}_{\mathrm{0}} }}{{ab}} \\ $$$${u}_{{Py}} =\sqrt{\mathrm{3}{gh}_{\mathrm{0}} }\:>\sqrt{\mathrm{2}{gh}_{\mathrm{0}} } \\ $$$${recall}:\:{a}\:{ball}\:{released}\:{at}\:{point}\:{P} \\ $$$${hits}\:{the}\:{ground}\:{with}\:{a}\:{speed}\:\sqrt{\mathrm{2}{gh}_{\mathrm{0}} }. \\ $$$$++++++++++ \\ $$$$\omega_{\mathrm{1}} =\left(\mathrm{cos}\:\theta−\frac{{ab}\:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }\right)\frac{\omega}{\:\sqrt{\frac{{l}^{\mathrm{2}} }{{b}^{\mathrm{2}} }−\:\mathrm{sin}^{\mathrm{2}} \:\theta}} \\ $$$$\alpha_{\mathrm{1}} =\frac{{d}\omega_{\mathrm{1}} }{{dt}}=\frac{{d}\omega_{\mathrm{1}} }{{d}\theta}×\frac{{d}\theta}{{dt}}=\omega\frac{{d}\omega_{\mathrm{1}} }{{d}\theta} \\ $$$$−{N}_{\mathrm{1}} {a}\:\mathrm{cos}\:\varphi_{\mathrm{1}} +{m}_{\mathrm{1}} {g}×\frac{{a}\:\mathrm{cos}\:\varphi_{\mathrm{1}} }{\mathrm{2}}=\frac{{m}_{\mathrm{1}} {a}^{\mathrm{2}} \alpha_{\mathrm{1}} }{\mathrm{3}} \\ $$$$\frac{{N}_{\mathrm{1}} }{{m}_{\mathrm{1}} {g}}=\frac{\mathrm{1}}{\mathrm{2}}−\frac{{a}}{\mathrm{3}{g}\:\mathrm{cos}\:\varphi_{\mathrm{1}} }×\omega\frac{{d}\omega_{\mathrm{1}} }{{d}\theta} \\ $$$$\frac{{N}_{\mathrm{1}} }{{m}_{\mathrm{1}} {g}}=\frac{\mathrm{1}}{\mathrm{2}}−\frac{{a}\omega}{\mathrm{3}{g}\sqrt{\mathrm{1}−\frac{{b}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }}}×\frac{{d}\omega_{\mathrm{1}} }{{d}\theta} \\ $$$${similarly} \\ $$$$\frac{{N}_{\mathrm{2}} }{{m}_{\mathrm{2}} {g}}=\frac{\mathrm{1}}{\mathrm{2}}−\frac{{b}\omega}{\mathrm{3}{g}\sqrt{\mathrm{1}−\frac{{a}^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta}{{l}^{\mathrm{2}} }}}×\frac{{d}\omega_{\mathrm{2}} }{{d}\theta} \\ $$
Commented by mr W last updated on 30/Nov/24
Commented by mr W last updated on 30/Nov/24
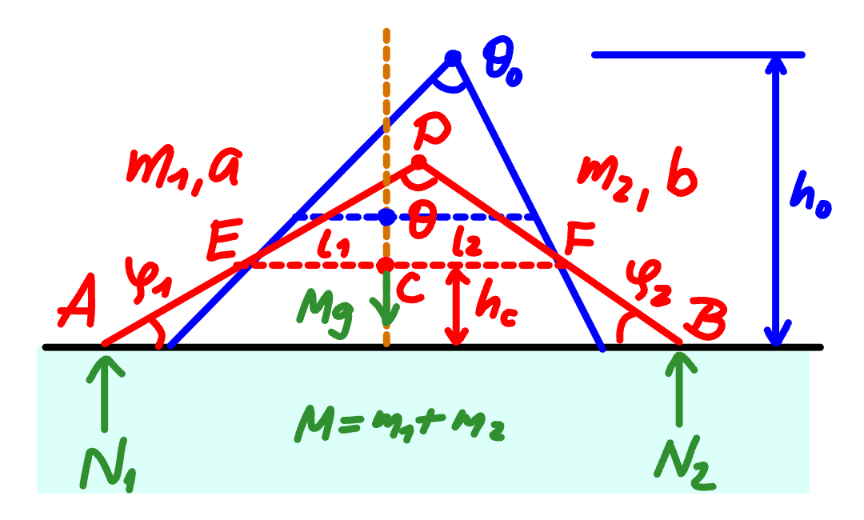
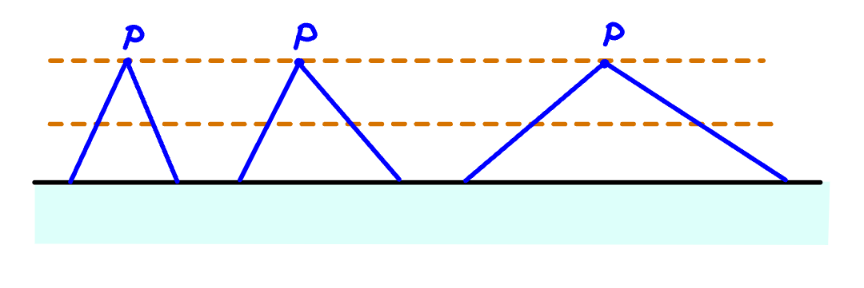
$${in}\:{all}\:{these}\:{cases}\:{the}\:{point}\:{P}\:{hits} \\ $$$${the}\:{ground}\:{with}\:{the}\:{same}\:{speed} \\ $$$${regardless}\:{which}\:{relation}\:{the} \\ $$$${lengthes}\:{and}\:{the}\:{masses}\:{of}\:{the}\:{rods} \\ $$$${have}. \\ $$
Commented by mr W last updated on 30/Nov/24
Commented by mr W last updated on 30/Nov/24
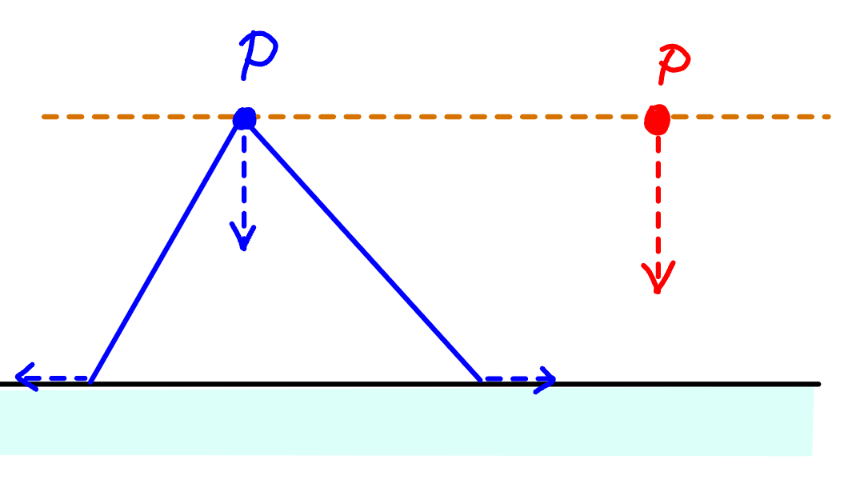
$${how}\:{is}\:{it}\:{possible}\:{that}\:{the}\:{point}\:{P} \\ $$$${hits}\:{the}\:{ground}\:{with}\:{a}\:{larger}\:{speed} \\ $$$${than}\:{a}\:{ball}\:{from}\:{the}\:{same}\:{height}? \\ $$