

Question Number 176660 by mr W last updated on 24/Sep/22
Commented by mr W last updated on 25/Sep/22
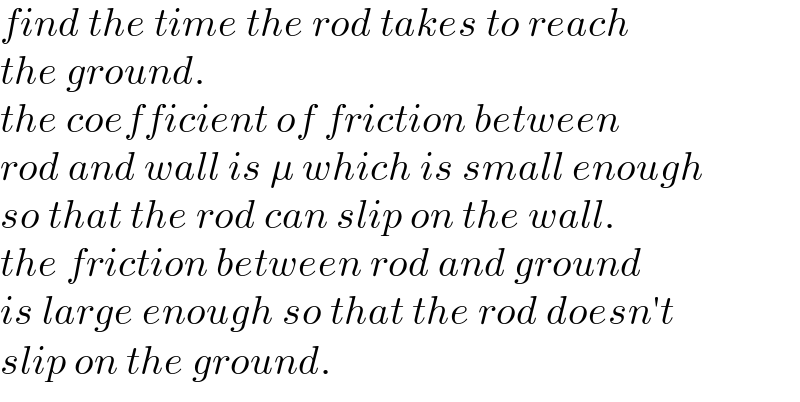
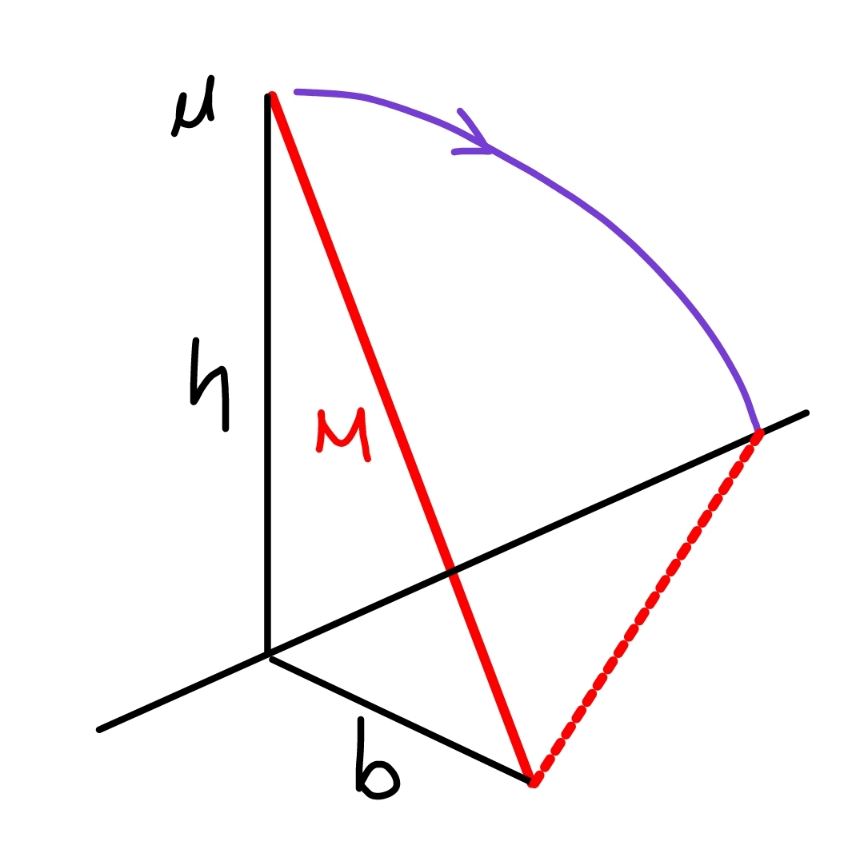
$${find}\:{the}\:{time}\:{the}\:{rod}\:{takes}\:{to}\:{reach} \\ $$$${the}\:{ground}.\: \\ $$$${the}\:{coefficient}\:{of}\:{friction}\:{between} \\ $$$${rod}\:{and}\:{wall}\:{is}\:\mu\:{which}\:{is}\:{small}\:{enough} \\ $$$${so}\:{that}\:{the}\:{rod}\:{can}\:{slip}\:{on}\:{the}\:{wall}. \\ $$$${the}\:{friction}\:{between}\:{rod}\:{and}\:{ground} \\ $$$${is}\:{large}\:{enough}\:{so}\:{that}\:{the}\:{rod}\:{doesn}'{t} \\ $$$${slip}\:{on}\:{the}\:{ground}. \\ $$
Answered by mr W last updated on 25/Sep/22
Commented by mr W last updated on 26/Sep/22
![L=(√(b^2 +h^2 )) I=((ML^2 )/3)=((M(b^2 +h^2 ))/3) ω=(dθ/dt) α=(d^2 θ/dt^2 )=(dω/dt)=ω(dω/dθ) b tan ϕ=h sin θ ⇒ϕ=tan^(−1) (((h sin θ)/b)) (dϕ/dt)=(((h cos θ)/b)/(1+(((h sin θ)/b))^2 ))×ω (d^2 ϕ/dt^2 )=(((h cos θ)/b)/(1+(((h sin θ)/b))^2 ))×ω×(dω/dθ)+ω^2 ×[−(((((h cos θ)/b))^2 )/((1+(((h sin θ)/b))^2 )^2 ))−(((h sin θ)/b)/(1+(((h sin θ)/b))^2 ))] (d^2 ϕ/dt^2 )=(((h cos θ)/b)/(1+(((h sin θ)/b))^2 ))×ω×(dω/dθ)−(ω^2 /(1+(((h sin θ)/b))^2 ))×[(((((h cos θ)/b))^2 )/(1+(((h sin θ)/b))^2 ))+((h sin θ)/b)] I(d^2 ϕ/dt^2 )=N h sin θ N=((M(b^2 +h^2 ))/(3h sin θ (1+(((h sin θ)/b))^2 ))){((h cos θ)/b)×ω×(dω/dθ)−ω^2 [(((((h cos θ)/b))^2 )/(1+(((h sin θ)/b))^2 ))+((h sin θ)/b)]} I(d^2 θ/dt^2 )=−fh+((Mgh sin θ)/2) I(d^2 θ/dt^2 )=−μNh+((Mgh sin θ)/2) ω(dω/dθ)=−(μ/(sin θ (1+(((h sin θ)/b))^2 ))){((h cos θ)/b)×ω×(dω/dθ)−ω^2 [(((((h cos θ)/b))^2 )/(1+(((h sin θ)/b))^2 ))+((h sin θ)/b)]}+((3gh sin θ)/(2(b^2 +h^2 ))) let λ=(h/b) ω(dω/dθ)=−(μ/(sin θ (1+λ^2 sin^2 θ))){λ cos θ×ω×(dω/dθ)−ω^2 (((λ^2 cos^2 θ)/(1+λ^2 sin^2 θ))+λ sin θ)}+((3gλ sin θ)/(2b(1+λ^2 ))) (1/2)((1/λ)+((μ cos θ)/(sin θ (1+λ^2 sin^2 θ))))(dω^2 /dθ)−(μ/(sin θ (1+λ^2 sin^2 θ)))(((λcos^2 θ)/(1+λ^2 sin^2 θ))+sin θ)ω^2 −((3g sin θ)/(2b(1+λ^2 )))=0 (dω^2 /dθ)−((2μλ(λcos^2 θ+λ^2 sin^3 θ+sin θ))/((sin θ (1+λ^2 sin^2 θ)+μλ cos θ)(1+λ^2 sin^2 θ)))ω^2 −((3gλ sin^2 θ (1+λ^2 sin^2 θ))/(b(1+λ^2 )(sin θ (1+λ^2 sin^2 θ)+μλ cos θ)))=0 let Φ=ω^2 (dΦ/dθ)−((2μλ(λcos^2 θ+λ^2 sin^3 θ+sin θ))/([sin θ (1+λ^2 sin^2 θ)+μλ cos θ](1+λ^2 sin^2 θ)))Φ−((3gλ sin^2 θ (1+λ^2 sin^2 θ))/(b(1+λ^2 )[sin θ (1+λ^2 sin^2 θ)+μλ cos θ]))=0 with p(θ)=((2μλ(λcos^2 θ+λ^2 sin^3 θ+sin θ))/([sin θ (1+λ^2 sin^2 θ)+μλ cos θ](1+λ^2 sin^2 θ))) q(θ)=((3gλ sin^2 θ (1+λ^2 sin^2 θ))/(b(1+λ^2 )[sin θ (1+λ^2 sin^2 θ)+μλ cos θ])) ⇒(dΦ/dθ)−p(θ)Φ−q(θ)=0 we get Φ=Φ(θ) ⇒ω=(√(Φ(θ))) ⇒(dθ/dt)=(√(Φ(θ))) ⇒dt=(dθ/( (√(Φ(θ))))) ⇒∫_0 ^T dt=∫_0 ^(π/2) (dθ/( (√(Φ(θ))))) ⇒T=∫_0 ^(π/2) (dθ/( (√(Φ(θ)))))](Q176705.png)
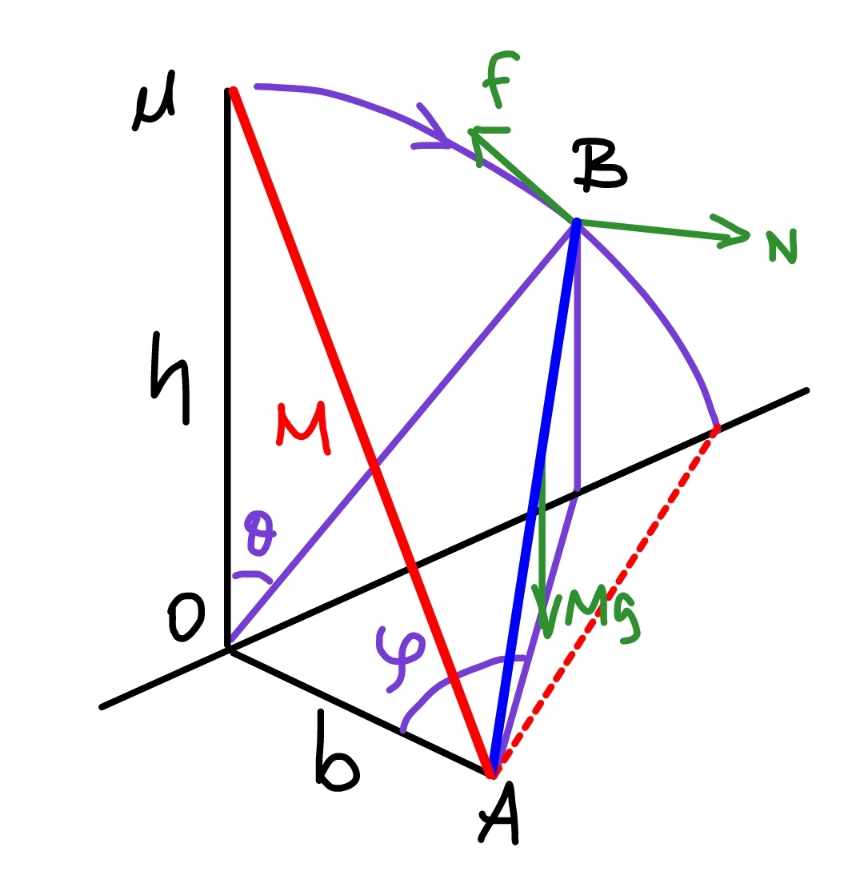
$${L}=\sqrt{{b}^{\mathrm{2}} +{h}^{\mathrm{2}} } \\ $$$${I}=\frac{{ML}^{\mathrm{2}} }{\mathrm{3}}=\frac{{M}\left({b}^{\mathrm{2}} +{h}^{\mathrm{2}} \right)}{\mathrm{3}} \\ $$$$\omega=\frac{{d}\theta}{{dt}} \\ $$$$\alpha=\frac{{d}^{\mathrm{2}} \theta}{{dt}^{\mathrm{2}} }=\frac{{d}\omega}{{dt}}=\omega\frac{{d}\omega}{{d}\theta} \\ $$$${b}\:\mathrm{tan}\:\varphi={h}\:\mathrm{sin}\:\theta \\ $$$$\Rightarrow\varphi=\mathrm{tan}^{−\mathrm{1}} \left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right) \\ $$$$\frac{{d}\varphi}{{dt}}=\frac{\frac{{h}\:\mathrm{cos}\:\theta}{{b}}}{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }×\omega \\ $$$$\frac{{d}^{\mathrm{2}} \varphi}{{dt}^{\mathrm{2}} }=\frac{\frac{{h}\:\mathrm{cos}\:\theta}{{b}}}{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }×\omega×\frac{{d}\omega}{{d}\theta}+\omega^{\mathrm{2}} ×\left[−\frac{\left(\frac{{h}\:\mathrm{cos}\:\theta}{{b}}\right)^{\mathrm{2}} }{\left(\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} \right)^{\mathrm{2}} }−\frac{\frac{{h}\:\mathrm{sin}\:\theta}{{b}}}{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }\right] \\ $$$$\frac{{d}^{\mathrm{2}} \varphi}{{dt}^{\mathrm{2}} }=\frac{\frac{{h}\:\mathrm{cos}\:\theta}{{b}}}{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }×\omega×\frac{{d}\omega}{{d}\theta}−\frac{\omega^{\mathrm{2}} }{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }×\left[\frac{\left(\frac{{h}\:\mathrm{cos}\:\theta}{{b}}\right)^{\mathrm{2}} }{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }+\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right] \\ $$$${I}\frac{{d}^{\mathrm{2}} \varphi}{{dt}^{\mathrm{2}} }={N}\:{h}\:\mathrm{sin}\:\theta \\ $$$${N}=\frac{{M}\left({b}^{\mathrm{2}} +{h}^{\mathrm{2}} \right)}{\mathrm{3}{h}\:\mathrm{sin}\:\theta\:\left(\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} \right)}\left\{\frac{{h}\:\mathrm{cos}\:\theta}{{b}}×\omega×\frac{{d}\omega}{{d}\theta}−\omega^{\mathrm{2}} \left[\frac{\left(\frac{{h}\:\mathrm{cos}\:\theta}{{b}}\right)^{\mathrm{2}} }{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }+\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right]\right\} \\ $$$${I}\frac{{d}^{\mathrm{2}} \theta}{{dt}^{\mathrm{2}} }=−{fh}+\frac{{Mgh}\:\mathrm{sin}\:\theta}{\mathrm{2}} \\ $$$${I}\frac{{d}^{\mathrm{2}} \theta}{{dt}^{\mathrm{2}} }=−\mu{Nh}+\frac{{Mgh}\:\mathrm{sin}\:\theta}{\mathrm{2}} \\ $$$$\omega\frac{{d}\omega}{{d}\theta}=−\frac{\mu}{\mathrm{sin}\:\theta\:\left(\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} \right)}\left\{\frac{{h}\:\mathrm{cos}\:\theta}{{b}}×\omega×\frac{{d}\omega}{{d}\theta}−\omega^{\mathrm{2}} \left[\frac{\left(\frac{{h}\:\mathrm{cos}\:\theta}{{b}}\right)^{\mathrm{2}} }{\mathrm{1}+\left(\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right)^{\mathrm{2}} }+\frac{{h}\:\mathrm{sin}\:\theta}{{b}}\right]\right\}+\frac{\mathrm{3}{gh}\:\mathrm{sin}\:\theta}{\mathrm{2}\left({b}^{\mathrm{2}} +{h}^{\mathrm{2}} \right)} \\ $$$${let}\:\lambda=\frac{{h}}{{b}} \\ $$$$\omega\frac{{d}\omega}{{d}\theta}=−\frac{\mu}{\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}\left\{\lambda\:\mathrm{cos}\:\theta×\omega×\frac{{d}\omega}{{d}\theta}−\omega^{\mathrm{2}} \left(\frac{\lambda^{\mathrm{2}} \mathrm{cos}^{\mathrm{2}} \:\theta}{\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}+\lambda\:\mathrm{sin}\:\theta\right)\right\}+\frac{\mathrm{3}{g}\lambda\:\mathrm{sin}\:\theta}{\mathrm{2}{b}\left(\mathrm{1}+\lambda^{\mathrm{2}} \right)} \\ $$$$\frac{\mathrm{1}}{\mathrm{2}}\left(\frac{\mathrm{1}}{\lambda}+\frac{\mu\:\mathrm{cos}\:\theta}{\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}\right)\frac{{d}\omega^{\mathrm{2}} }{{d}\theta}−\frac{\mu}{\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}\left(\frac{\lambda\mathrm{cos}^{\mathrm{2}} \:\theta}{\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}+\mathrm{sin}\:\theta\right)\omega^{\mathrm{2}} −\frac{\mathrm{3}{g}\:\mathrm{sin}\:\theta}{\mathrm{2}{b}\left(\mathrm{1}+\lambda^{\mathrm{2}} \right)}=\mathrm{0} \\ $$$$\frac{{d}\omega^{\mathrm{2}} }{{d}\theta}−\frac{\mathrm{2}\mu\lambda\left(\lambda\mathrm{cos}^{\mathrm{2}} \:\theta+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{3}} \:\theta+\mathrm{sin}\:\theta\right)}{\left(\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta\right)+\mu\lambda\:\mathrm{cos}\:\theta\right)\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}\omega^{\mathrm{2}} −\frac{\mathrm{3}{g}\lambda\:\mathrm{sin}^{\mathrm{2}} \:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}{{b}\left(\mathrm{1}+\lambda^{\mathrm{2}} \right)\left(\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta\right)+\mu\lambda\:\mathrm{cos}\:\theta\right)}=\mathrm{0} \\ $$$${let}\:\Phi=\omega^{\mathrm{2}} \\ $$$$\frac{{d}\Phi}{{d}\theta}−\frac{\mathrm{2}\mu\lambda\left(\lambda\mathrm{cos}^{\mathrm{2}} \:\theta+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{3}} \:\theta+\mathrm{sin}\:\theta\right)}{\left[\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta\right)+\mu\lambda\:\mathrm{cos}\:\theta\right]\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}\Phi−\frac{\mathrm{3}{g}\lambda\:\mathrm{sin}^{\mathrm{2}} \:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}{{b}\left(\mathrm{1}+\lambda^{\mathrm{2}} \right)\left[\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta\right)+\mu\lambda\:\mathrm{cos}\:\theta\right]}=\mathrm{0} \\ $$$${with}\:{p}\left(\theta\right)=\frac{\mathrm{2}\mu\lambda\left(\lambda\mathrm{cos}^{\mathrm{2}} \:\theta+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{3}} \:\theta+\mathrm{sin}\:\theta\right)}{\left[\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta\right)+\mu\lambda\:\mathrm{cos}\:\theta\right]\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)} \\ $$$$\:\:\:\:\:\:\:\:\:\:{q}\left(\theta\right)=\frac{\mathrm{3}{g}\lambda\:\mathrm{sin}^{\mathrm{2}} \:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\right)}{{b}\left(\mathrm{1}+\lambda^{\mathrm{2}} \right)\left[\mathrm{sin}\:\theta\:\left(\mathrm{1}+\lambda^{\mathrm{2}} \:\mathrm{sin}^{\mathrm{2}} \:\theta\right)+\mu\lambda\:\mathrm{cos}\:\theta\right]} \\ $$$$\Rightarrow\frac{{d}\Phi}{{d}\theta}−{p}\left(\theta\right)\Phi−{q}\left(\theta\right)=\mathrm{0} \\ $$$${we}\:{get}\:\Phi=\Phi\left(\theta\right) \\ $$$$\Rightarrow\omega=\sqrt{\Phi\left(\theta\right)} \\ $$$$\Rightarrow\frac{{d}\theta}{{dt}}=\sqrt{\Phi\left(\theta\right)} \\ $$$$\Rightarrow{dt}=\frac{{d}\theta}{\:\sqrt{\Phi\left(\theta\right)}} \\ $$$$\Rightarrow\int_{\mathrm{0}} ^{{T}} {dt}=\int_{\mathrm{0}} ^{\frac{\pi}{\mathrm{2}}} \frac{{d}\theta}{\:\sqrt{\Phi\left(\theta\right)}} \\ $$$$\Rightarrow{T}=\int_{\mathrm{0}} ^{\frac{\pi}{\mathrm{2}}} \frac{{d}\theta}{\:\sqrt{\Phi\left(\theta\right)}} \\ $$
Commented by Tawa11 last updated on 25/Sep/22

$$\mathrm{Great}\:\mathrm{sir} \\ $$